MATH347DS L06: Applying the FTLA (LU)
|
Overview
-
Least squares as an application of projection and factorization
-
Change of coordinates (linear systems), factorization
|
MATH347DS L06: Applying the FTLA (LU)
|
Least squares as an application of projection and factorization
Change of coordinates (linear systems), factorization
|
Least squares method and solution by projection
|
Mathematical statement: solve the minimization problem
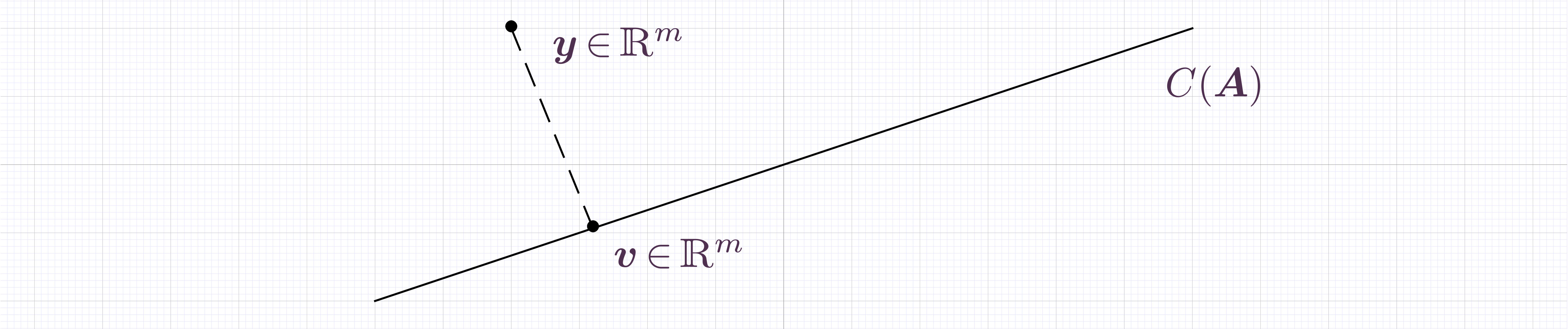
Approach: project onto the column space of :
Find an orthonormal basis for column space of by factorization,
State that is the projection of ,
State that is within the column space of ,
Set equal the two expressions of ,
Solve the triangular system to find (in Octave: c=R\(Q'y))
|
Linear regression coding
|
Generate some data on a line and perturb it by some random quantities
octave> |
m=1000; x=(0:m-1)/m; c0=2; c1=3; yex=c0+c1*x; y=(yex+rand(1,m)-0.5)'; |
Form the matrices, , (qr(A,0) is the Octave gs(A))
octave> |
A=ones(m,2); A(:,2)=x(:); [Q R]=qr(A,0); |
Solve the system
octave> |
c=R\(transpose(Q)*y); |
Form the linear combination closest to
octave> |
v=A*c; |
|
Linear regression example
|
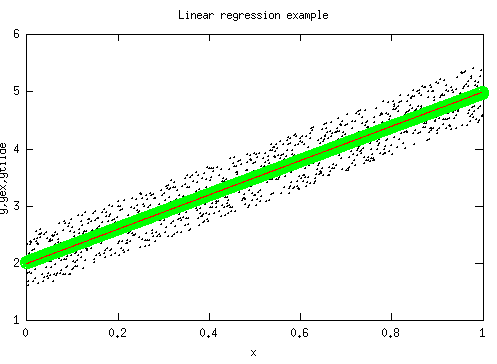
Plot the perturbed data (black dots), the result of the linear regression (green circles), as well as the line used to generate yex (red line)
octave> |
plot(x,y,'.k',x,v,'og',x,yex,'r'); title('Linear regression example'); xlabel('x'); ylabel('y,v,yex'); cd /home/student; print data.eps; |
|
Quadratic regression
|
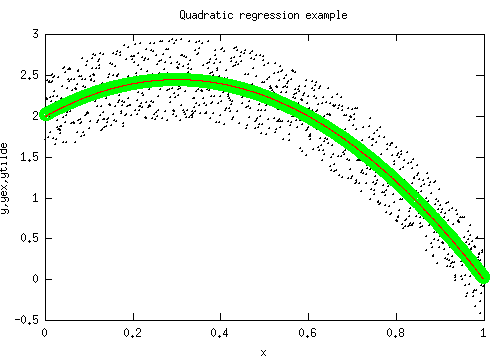
The key observation is that the matrix has columns obtained by evaluating the functions at the values . This leads to easy extension to data fitting to higher degree polynomials, for instance a quadratic
octave> |
m=1000; x=(0:m-1)/m; c0=2; c1=3; c2=-5.; yex=c0+c1*x+c2*x.^2; y=(yex+rand(1,m)-0.5)'; |
octave> |
A=ones(m,3); A(:,2)=x(:); A(:,3)=x.^2; [Q R]=qr(A,0) |
octave> |
c=R\(transpose(Q)*y); |
octave> |
v=A*c; disp(c'); |
2.0239 2.8873 -4.8881
octave> |
disp(norm(y-v)/norm(y)/m); |
1.4494e-04
octave> |
|
Quadratic regression example
|
Plot the perturbed data (black dots), the result of the quadratic regression (green circles), as well as the parabola used to generate yex (red line)
octave> |
plot(x,y,'.k',x,ytilde,'og',x,yex,'r'); title('Quadratic regression example'); xlabel('x'); ylabel('y,yex,ytilde'); cd /home/student; print data.eps; |
octave> |
|
The
case: polynomial interpolation
|
Definition. The polynomial interpolant of data with if is a polynomial of degree
that satisfies the conditions , .
We can apply the same approach. In this particular case, the error can be made zero.
octave> |
m=4; x=(0:m-1)'; c0=2; c1=3; c2=-5.; c3=-1; y=c0+c1*x+c2*x.^2+c3*x.^3; |
octave> |
A=ones(m,m); A(:,2)=x(:); A(:,3)=x.^2; A(:,4)=x.^3; [Q R]=qr(A,0); |
octave> |
c=R\(transpose(Q)*y); disp(c'); |
2.00000 3.00000 -5.00000 -1.00000
Note that the coefficients used to generate the data are recovered exactly.
|
Gaussian elimination
|
Recall the basic operation in row echelon reduction: constructing a linear combination of rows to form zeros beneath the main diagonal, e.g.
This can be stated as a matrix multiplication operation, with
|
Gauss multiplier
|
Definition. The matrix
with , and the matrix obtained after step of row echelon reduction (or, equivalently, Gaussian elimination) is called a Gaussian multiplier matrix.
|
Matrix formulation of Gaussian elimination
|
For nonsingular, the successive steps in row echelon reduction (or Gaussian elimination) correspond to successive multiplications on the left by Gaussian multiplier matrices
The inverse of a Gaussian multiplier is
|
factorization
|
From obtain
Due to the simple form of the matrix is easily obtained as
|
Solving a linear system by
factorization
|
Using the concept of an factorization, finding the solution to a linear system can be formulated as the following steps:
Find the factorization,
Replace factorization into system and regroup . Solve the lower triangular system to find
Solve the upper triangular system to find