Eigenproblems
Synopsis. The simple question of what directions
remain unchanged by a linear mapping leads to widely useful concepts. In
particular, constructive algorithms to obtain the orthonormal bases for
the fundamental matrix subspaces predicted by the singular value
decomposition are obtained. Several additional matrix factorizations
arise and offer insight into linear mappings.
1.Determinants
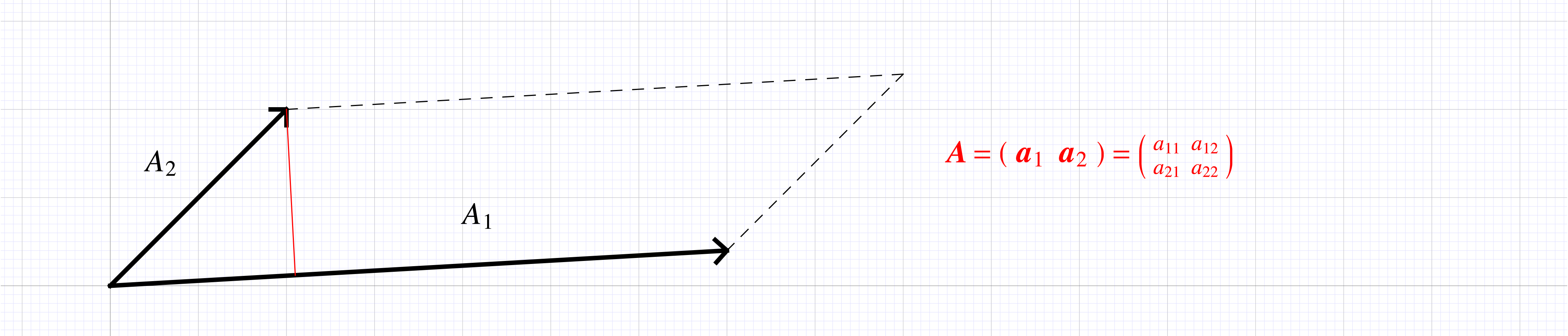
Linear mappings of a vector space onto itself
are characterized by a square matrix
whose column vectors can be considered as the edges of a geometric
object in .
When a
parallelogram is obtained with area ,
with the length of the base edge and
the height. The parallelogram edges are
specified by the vectors
oriented at angles
with respect to the . With ,
the parallelogram height is
The trigonometric functions can be related to the edge vectors through
The above allow statement of a formula for the parallelogram area
strictly in terms of edge vector components
By the formula can be either positive
of negative, and indicates the order of denoting edge vectors since
the parallelogram can be specified either as edges or .
|
|
Figure 1. Area of a parallelogram
(hyperparallelipiped in two-dimensions) with edge vectors
.
|
Recall that the norm of a vector
is a functional giving the magnitude of a vector. The norm
of a matrix
is also a functional specifying the maximum amplification of vector
norm through the linear mapping ,
as encountered in the SVD singular values. The above calculations
suggest yet another functional, the signed area of the geometric
object with edge vectors .
This functional is a mapping from the vector space of
matrices to the reals and is known as the
determinant of a matrix.
Definition. The determinant of a square
matrix
is a real number giving the (oriented) volume of the parallelipiped
spanned by matrix column vectors.
The geometric interpretation of a determinant leads to algebraic
computation rules. For example, consider the parallelogram with
colinear edge vectors, .
In this case the parallelogram area is zero. In general whenever one
of the vectors within is linearly dependent on the others
the dimension of is less than ,
and the volume of the associated parallelipiped is zero. Deduce that
|
(1) |
Swapping a pair of edges changes the orientation of the edge vectors
and leads to a sign change of the determinant. Another swap changes
the sign again. A sign , the parity of a
permutation, is associated to any permutation
where is the number of pair swaps
needed to carry out the permutation. It
results that applying a permutation matrix onto
changes the determinant sign
|
(2) |
Recall that
permutes rows and
permutes columns. The edges of a geometric object could be specified
in either column format or row format with no change in the geometric
properties leading to
Scaling the length of an edge changes the volume in accordance with
|
(4) |
With reference to Fig. (1), consider edge
decomposed into two parts along the same direction .
The area of the parallelogram with edge
is the sum of those with edges .
This generalizes to arbitrary decompositions of the
vector, leading to the rule
|
(5) |
The above two rules (4,5) state that the
determinant is a linear mapping in the first column. In conjunction
with column permutation, deduce that the determinant is linear in any
column or row of the matrix .
Consider now an important consequence, the result upon the determinant
of adding a multiple of one column to another column
Since the second term in the above sum has two identical columns its
value is zero and
stating that adding a multiple of a column to another does not change
the value of a determinant. Similarly, adding a multiple of a row to
another does not change the value of a determinant. The practical
importance of the rules is that the elementary operations from
Gaussian elimination do not change the value of a determinant.
The determinant of the identity matrix equals one, ,
and that of a matrix product is the product of determinants of the
factors
The determinant of a diagonal matrix is the product of its diagonal
components
The properties can be used in conjunction with known matrix
factorizations.
-
Determinant of an orthogonal
matrix is .
Since
-
Determinant of a matrix equals the product of its singular values
In particular if , .
The determinant can be defined either in geometric terms as above or
in algebraic terms. The ageneral algebraic definition is specified in
terms of the components of the matrix as
with the sum carried out over all permutations of
numbers, one of which is specified as
There are such
permuations, a number that grows rapidly with
hence the algebraic definition holds little interest for practical
computation, though it was the object of considerable historical
interest through Cramer's rule to solve linear systems.
2.Eigenvalues and the characteristic
polynomial
The eigenproblem is to find invariant directions of a linear mapping
,
meaning those non-zero input vectors that lead to an output in the
same direction perhaps scaled by factor
The above can be restated as
The above is obviously satisfied for ,
but this case is excluded as a solution to the eigenproblem since the
zero vector does not uniquely specify a direction in .
For there to be a non-zero solution to the eigenproblem the null space
of
must be of dimension at least one. It results that the matrix
is not of full rank, often stated as
is singular, and at least one of the singular values of
must be zero. Through the determinant properties it results that
The algebraic definition of a determinant leads to
such that is a polynomial of degree in . It is
known through the fundamental theorem of algebra that a polynomial of
degree has
roots ,
with some perhaps repeated
Note that in general the roots can be complex even for polynomials
with real coefficients as exemplified by .
If
are the distinct roots, each repeated
times
The number of times a root is repeated is called the algebraic
multiplicty of an eigenvalue.
For each eigenvalue
has a non-trivial null space called the eigenspace of
The eigenvector associated with an eigenvalue is a member of this
eigenspace
Note that eigenvectors can be scaled by any non-zero number since
In practice, it is customary to enforce .
The dimension of the eigenspace is called the geometric multiplicity of
eigenvalue
The conclusion from the above is that
solutions of the eigenproblem exist. There are
eigenvalues, not necessarily distinct, and associated eigenvectors. As
usual instead of the individual statements
it is more efficient to group eigenvalues and eigenvectors into matrices
and state the eigenproblem in matrix terms as
3.Eigendecomposition
3.1.Simple cases
Insight into eigenproblem solution is gained by considering common
geometric transformations.
Projection matrix. The matrix
projects a vector onto . Vectors within are
unaffected
hence is an eigenvector with
associated eigenvalue .
The matrix is of rank one and by the
FTLA, .
In the SVD of ,
It results that any vector within the
left null space
is an eigenvector with associated eigenvalue .
In matrix form the eigenproblem solution is
and since is orthogonal ,
multiplication no the left by
is possible leading to
Reflection matrix. The matrix
is the reflector across . Vectors
colinear with do not change
orientation
and are therefore eigenvectors with associated eigenvalue .
Vectors orthogonal to
change orientation along their direction and are hence eigenvectors with
associated eigenvalue
In there are
different vectors orthogonal to and
mutually orthonormal. The eigenproblem solution can again be stated in
matrix form as
Since is an orthogonal matrix, it
results that
Rotation matrix. The matrix
represents the isometric rotation of two-dimensional vectors. If ,
with eigenvalues ,
and eigenvector matrix .
For ,
the eigenvalues are ,
again with eigenvector matrix .
If ,
the orientation of any non-zero
changes upon rotation by . The
characteristic polynomial has complex roots
and the directions of invariant orientation have complex components (are
outside the real plane )
3.2.Vectors and matrices with complex
components
The above rotation case is an example of complex values arising in the
solution of an eigenproblem for a matrix with real coefficients.
Fortunately, the framework for working with vectors and matrices that
have complex components is almost identical to working in the reals. The
only significant difference is the realtionship between the two-norm and
inner product. When
the inner product
corresponds to the dot product and the two-norm of a vector can be
defined as
Consider a complex number ,
taken to represent a point at coordinates in
the plane. The
magnitude or absolute value of is defined
as the distance from the origin to point in
Introducing the complex conjugate
(the reflection of across the -axis),
the absolute value can also be stated as
Extending this idea to vectors of complex numbers, transposition is
combined with taking the conjugate into an operation of taking the
adjoint denoted by an superscript
Everywhere a transposition appears when dealing with vectors in , it is replaced by
taking the adjoint when working with vectors in .
Most notably when
it is said to be orthogonal if
For
the matrix is said to be unitary if
Orthogonality of
is expressed as .
The FTLA is restated as
and the SVD as
3.3.General solution of the eigenproblem
As exemplified above, solving an eigenproblem
requires:
-
Finding the roots of
the characteristic polynomial ;
-
Finding bases for the eigenspaces .
The matrix form of the solution is then stated as
If the matrix has linearly independent
columns (it is non-singular), it can then be inverted leading to the
eigendecomposition
yet another factorization of the matrix .
Such eigendecompositions are very useful when repeatedly applying a
linear mapping since .
In general after applications of the matrix
arises. If an eigendecomposition is avaiable, then
and is easily
computable
The simple eigenproblem for
reveals issues that might arise in more general situations. The
characteristic polynomial
has a repeated root .
Note that
is already in row echelon form indicating that . The FTLA then
states the
and the matrix form of the eigenproblem solution is
Note that the second column of is the
same as the first, hence has linearly
dependent columns and cannot be inverted. The matrix
has an eigenproblem solution but does not have an eigendecomposition. An
eigendecomposition is possible only when for each eigenvalue its
algebraic multiplicty is equal to its geometric multiplicity.
An immediate question is to identify those matrices for which an
eigendecomposition is possible and perhaps of a particularly simple
form. A matrix
is said to be normal if
A normal matrix has a unitary eigendecomposition. There exists
unitary that satisfies
In the real case the above becomes ,
and there exists
orthogonal that satisfies
Computational procedures to solve an eigenproblem become quite
complicated for the general case and have been the object of extensive
research. Fortunately the problem is well understood and solution
procedures have been implemented in all major computational systems. In
Julia for example:
∴ |
A=[1 0; 0 2]; eigvals(A) |
∴ |
A=[1 1; 0 1]; eigvals(A) |
|
(9) |
4.Finding the SVD
An important application of eigendecompositions is actual computation of
the SVD. The SVD theorem simply asserted existence of intrinsic
orthogonal basis for the domain and codomain of a linear mapping in
which the mapping behaved as a simple scaling. It did not provide a
procedure to find those bases in general.
From the above, though an eigendecomposition for general
may not exist, an orthogonal decomposition always exists for
since
verifies that is normal. Consider now
the SVD
to find that
stating that the left singular vectors
are the eigenvectors of .
Likewise
is a normal matrix and from
the right singular vectors are found as the eigenvectors of .
The singular values of are the square
roots of the eigenvalues of either or
.
The two eigenproblems above are solved whenever a computation of the SVD
is invoked within Julia.