MATH528Due date: 09/27/18
Exercise. PS2.2.16
Verify:
In[2]:=
ODE = y”[x] + 1.7 y'[x] - 11.18 y[x] == 0;
DSolveValue[ODE,y[x],x]
In[3]:=
Exercise. PS2.2.17
Verify
In[3]:=
ODE = y”[x] + 2 Sqrt[5] y'[x] + 5 y[x] == 0;
DSolveValue[ODE,y[x],x]
In[4]:=
Exercise. PS2.2.21
Verify
In[4]:=
ODE = y”[x] + 25 y[x] == 0;
DSolveValue[{ODE, y[0]==4.6, y'[0]==-1.2},y[x],x]
In[5]:=
Exercise. PS2.2.25
In[5]:=
ODE = y”[x]- y[x] == 0;
DSolveValue[{ODE,y[0]==2,y'[0]==-2},y[x],x]
In[6]:=
Exercise. PS2.8.5
In[15]:=
L[y_,t_] = D[y[t],{t,2}] + D[y[t],t] + 425/100 y[t]
In[16]:=
yh[t_] = DSolveValue[L[y,t]==0,y[t],t]
In[17]:=
From above, the system is damped, hence the steady state , with sought as , using method of undetermined coefficients
In[17]:=
yp[t_] = a Cos[45t/10] + b Sin[45t/10]
In[18]:=
coef = Coefficient[ L[yp,t]-221/10 Cos[45t/10] ,
{Cos[45t/10],Sin[45t/10]} ]
In[19]:=
Solve[coef == {0,0},{a,b}]
In[20]:=
From above, for large , . Verify
In[22]:=
Expand[TrigReduce[DSolveValue[L[y,t]==221/10
Cos[45t/10],y[t],t]]]
In[23]:=
Exercise. PS2.8.7
In[1]:=
L[y_,t_] = 4 D[y[t],{t,2}] + 12 D[y[t],t] + 9 y[t]
In[2]:=
yh[t_] = DSolveValue[L[y,t]==0,y[t],t]
In[3]:=
The system is damped with a repeated root. Seek
In[3]:=
yp[t_] = a Cos[3t] + b Sin[3t] + c
In[4]:=
coef = Coefficient[ L[yp,t]-(225 -75 Sin[3t]) ,
{Sin[3t],Cos[3t]} ]
In[5]:=
csol = Solve[coef == {0,0},{a,b}][[1]]
In[10]:=
Simplify[L[yh,t] + Evaluate[L[yp,t] /. csol] - (225 - 75
Sin[3t])]
In[11]:=
From above , and the steady state solution is Verify
In[12]:=
Expand[DSolveValue[L[y,t]==225-75 Sin[3t],y[t],t]]
In[13]:=
Exercise. PS2.8.15
In[13]:=
L[y_,t_] = D[y[t],{t,2}] + 4 D[y[t],t] + 8 y[t]
In[14]:=
yh[t_] = DSolveValue[L[y,t]==0,y[t],t]
In[17]:=
Expand[TrigReduce[DSolveValue[L[y,t] == 2 Cos[2t] +
Sin[2t],y[t],t]]]
In[18]:=
Exercise. PS2.8.20
In[18]:=
L[y_,t_] = D[y[t],{t,2}] + 5 y[t]
In[19]:=
r[t_] = Cos[Pi t] - Sin[Pi t]
In[23]:=
TrigReduce[DSolveValue[{L[y,t]==r[t],y[0]==0,y'[0]==0},y[t],t]]
In[24]:=
Problem. PS2.2.31
Problem. PS2.2.32
The homogeneous linear system can have a non-zero solution only if contradicting condition . Hence are linearly independent for all .
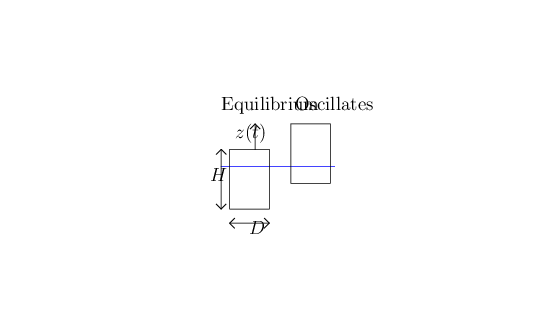
Problem. PS2.4.8
is the deviation from equilibrium position
Newton's second law states
Buoy mass is
is gravitational acceleration
Force imbalance when buoy is out of equilibrium is
Buoy oscilations described by
with solution
Problem. PS2.4.14
with given by the critical damping condition
The gun barrel is modeled as , , , with
In[28]:=
L[y_,t_] = D[y[t],{t,2}] + y[t]
In[29]:=
r[t_]=1-(t/Pi)^2
In[30]:=
Solve the IVP to find motion up to
In[32]:=
sol1[t_]=DSolveValue[{L[y,t]==r[t],y[0]==0,y'[0]==0},y[t],t]
In[33]:=
Find position, velocity at
In[33]:=
u={sol1[Pi],sol1'[t] /. t->Pi}
In[34]:=
Now solve the homogeneous ODE for
In[38]:=
sol2[t_]=DSolveValue[Flatten[{L[y,t]==0,{y[Pi],y'[Pi]}==u}],y[t],t]
In[39]:=
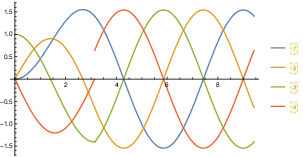
Define the full solution along with some interesting derivatives and plot it
In[43]:=
sol[t_]:=If[t<=Pi,sol1[t],sol2[t]];
plt =
Plot[{sol[t],sol'[t],sol”[t],sol”'[t]},{t,0,3Pi},PlotLegends->Automatic];
Export["/home/student/courses/MATH528/HW04Fig01.pdf",plt]
In[44]:=
The plot is rendered in Fig. 1
 |