| MATH590 Homework 1: Approximation in |
|
Carry out analysis of the cell-phone accelerometer data according to the
following template, answering the questions. The objective of this
homework is to familiarize yourself with some linear algebra and
numerical analysis techniques that are commonly encountered in data
analysis.
Turn in this TeXmacs file and the two data files AveragePeriod.LastName.data,
PolyCoef.LastName.data. The results contained in these
files will be used in subsequent topological data analysis.
1Qualitative data analysis
A first step in processing the data acquired from the cell phone is to carry out
some basic qualitative analysis, shown here using Octave (Matlab clone).
1.1Data input
1.1.1Visual inspection of data
octave>
|
dir='/home/student/courses/MATH590/NUMdata';
chdir(dir);
LastName = 'Mitran';
data=csvread(strcat(LastName,'.csv'));
[m,d] = size(data); disp([m d]);
|
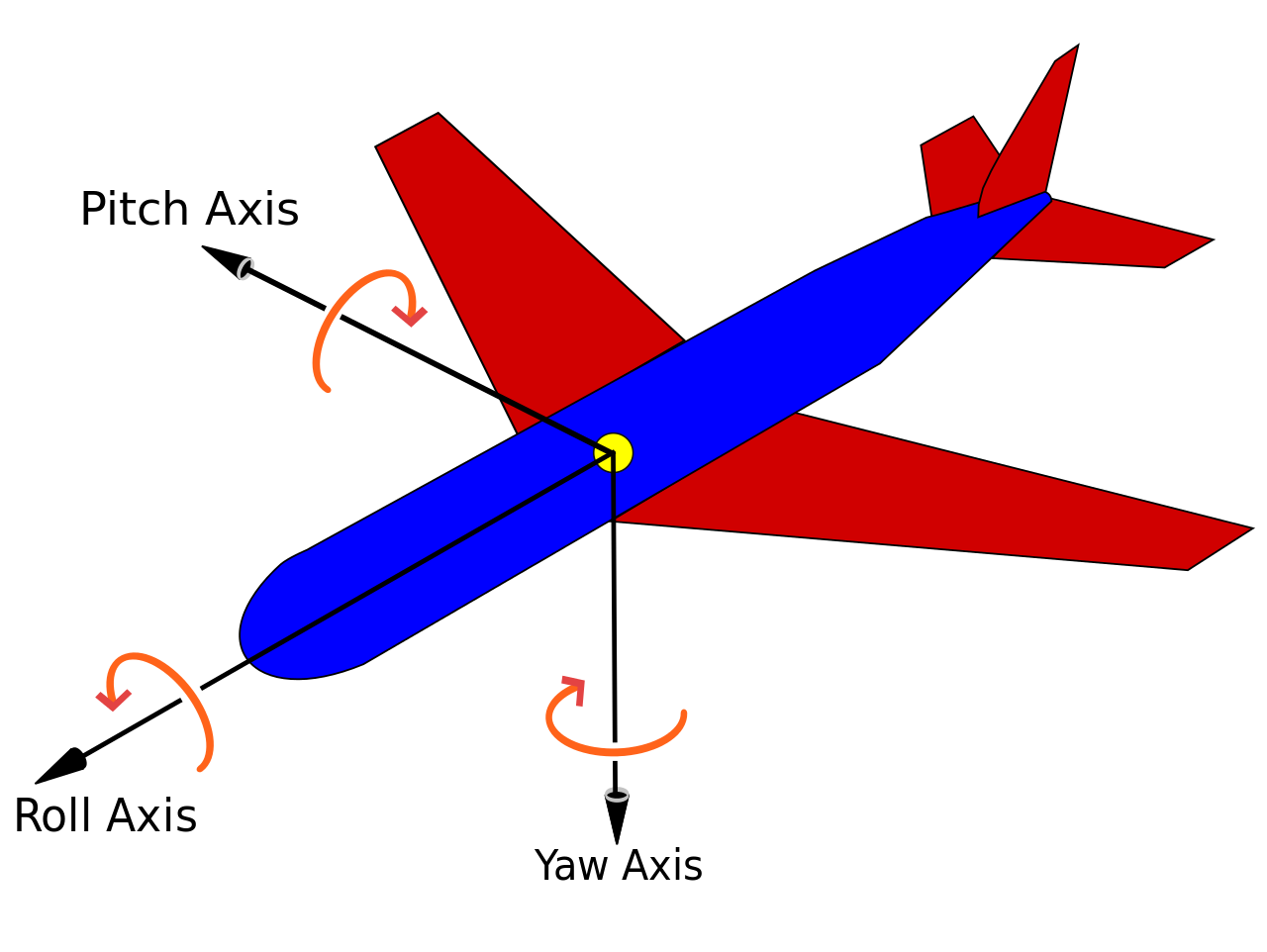
Question 1.
-
Identify to which directions (forward walking, up and down,
sideways) each column corresponds
| Column |
Notation |
Physical quantity |
Units |
| 1 |
t |
time |
s |
| 2 |
|
sideways acceleration |
m/s |
| 3 |
|
up-down acceleration |
m/s |
| 4 |
|
forward-backward acceleration |
m/s |
| 5 |
|
pitch angular velocity |
rad/s |
| 6 |
|
yaw angular velocity |
rad/s |
| 7 |
|
roll angular velocity |
rad/s |
|
|
Table 1. Data notation, significance,
units
|
-
Identify the physical units used in the measurements
See Table 1.
-
Are the values reasonable?
One step occurs every approximately every T=0.75 seconds. During
that time a person's center of gravity moves up and down by
about h=0.125 m, giving upward velocity of ,
,
and this is the order of magnitude of the values in the column, so the
values seem reasonable. Also, the sideways acceleration values
are consistently smaller, and the forward values about the same
as the vertical ones and, importantly, out of phase as expected
in a normal gait. The largest angular velocities correspond to
yaw, also as expected since this is the alternating
forward-backward motion of left-right side of the body during
the gait. Finally, walking is an effort against gravitational
acceleration ,
and one would expect values about one-tenth of .
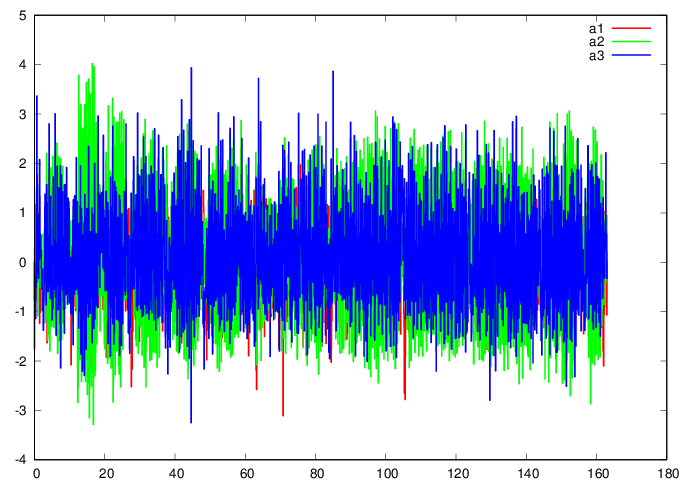
1.1.2Plot data
Write data to a file.
octave>
|
[t,iu]=unique(data(:,1));
mu=max(size(iu));
raddeg=pi/180;
a=data(iu,2:4); epsilon=data(iu,5:7)/raddeg;
fid=fopen(strcat(LastName,'.data'),'w');
fprintf(fid,'%f %f %f %f %f %f %f\n',[t a epsilon]');
fclose(fid);
|
Change the file plotted to your data.
GNUplot]
|
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "red" lw 3
set style line 2 lt 2 lc rgb "green" lw 3
set style line 3 lt 2 lc rgb "blue" lw 3
plot 'Mitran.data' u 1:2 w l ls 1 title "a1",
” u 1:3 w l ls 2 title "a2", ” u 1:4
w l ls 3 title "a3"
|
GNUplot]
|
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "red" lw 3
set style line 2 lt 2 lc rgb "green" lw 3
set style line 3 lt 2 lc rgb "blue" lw 3
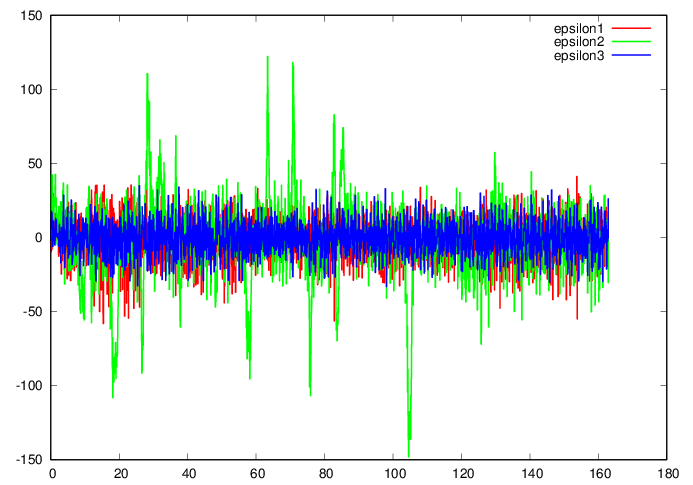
plot 'Mitran.data' u 1:5 w l ls 1 title
"epsilon1", ” u 1:6 w l ls 2 title
"epsilon2", ” u 1:7 w l ls 3 title
"epsilon3"
|
Question 2. What are your observations
on the physical relevance of the data?
Data shows an average close to zero, as expected, with large values
for yaw angular velocity in the data that appear correleated with
turns in the path.
2Extract walker gait data
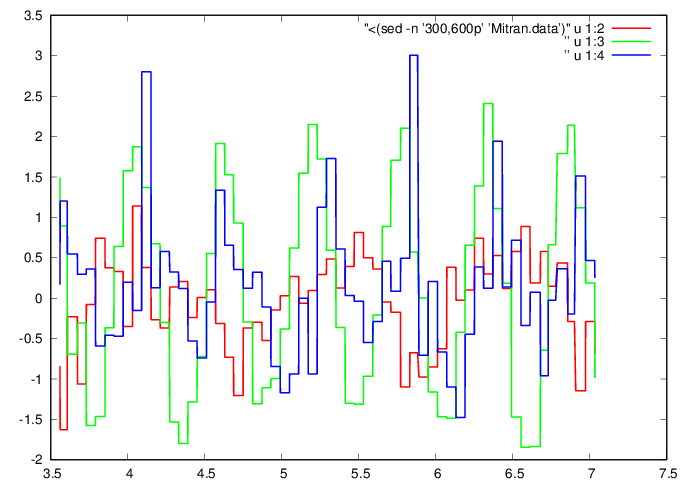
2.1Choose a data window
Modify the data window as needed
GNUplot]
|
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "red" lw 3
set style line 2 lt 2 lc rgb "green" lw 3
set style line 3 lt 2 lc rgb "blue" lw 3
plot "<(sed -n '300,600p' 'Mitran.data')" u
1:2 w l ls 1, ” u 1:3 w l ls 2, ” u 1:4 w l ls
3
|
octave>
|
iG0=300; nG=256; iG1=iG0+nG-1;
tG=t(iG0:iG1); aG=a(iG0:iG1,:);
tG0=tG(1); tG1=tG(nG); dt=(tG1-tG0)/nG;
tGi=tG0+(0:nG-1)*dt;
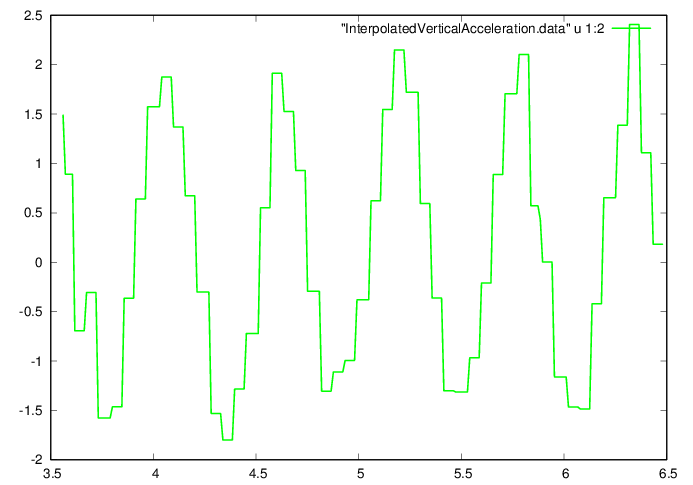
aGi=interp1(tG',aG(:,2)',tGi);
fid=fopen('InterpolatedVerticalAcceleration.data','w');
ta = [tGi' aGi'];
fprintf(fid,'%f %f\n',ta');
fclose(fid);
|
GNUplot]
|
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "green" lw 3
plot "InterpolatedVerticalAcceleration.data" u
1:2 w l ls 1
|
Question 3. How do you explain changes
in the vertical acceleration between steps?
This is the expected acceleration of the body's center of mass
during stepping motion. In contrast if this was rolling motion (i.e.,
on wheels) the vertical acceleration should be small. This values
shows even large variation when stepping on stairs.
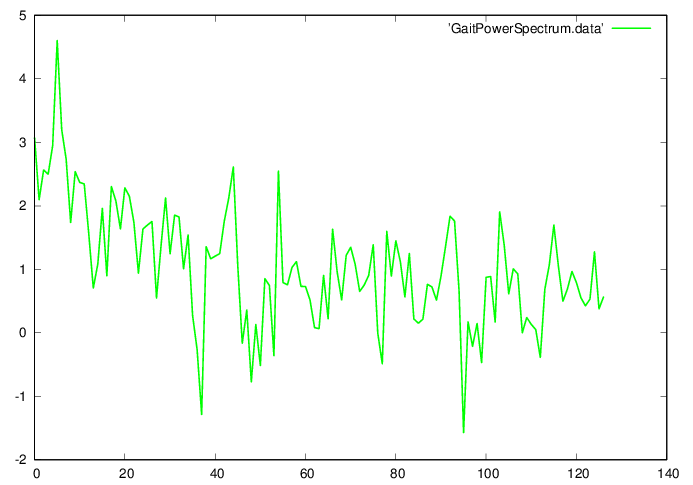
2.2Determine gait period
octave>
|
AGi=fft(aGi); PAGi = log10(AGi.*conj(AGi));
fid=fopen('GaitPowerSpectrum.data','w');
fprintf(fid,'%f\n',PAGi(1:nG/2-1));
fclose(fid);
|
GNUplot]
|
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "green" lw 3
plot 'GaitPowerSpectrum.data' w l ls 1
|
octave>
|
[val,idx] = max(PAGi); disp([val idx]);
|
octave>
|
TG = (tG1-tG0)/(idx-1)
|
octave>
|
nT=floor(max(size(aGi))/(idx-1))
|
Question 4. Does the period value
correspond to a full stride or stepping on one leg?
The period corresponds to stepping on one leg. A full stride
(returning to the same foot on the ground at start of step)
corresponds to 2 periods.
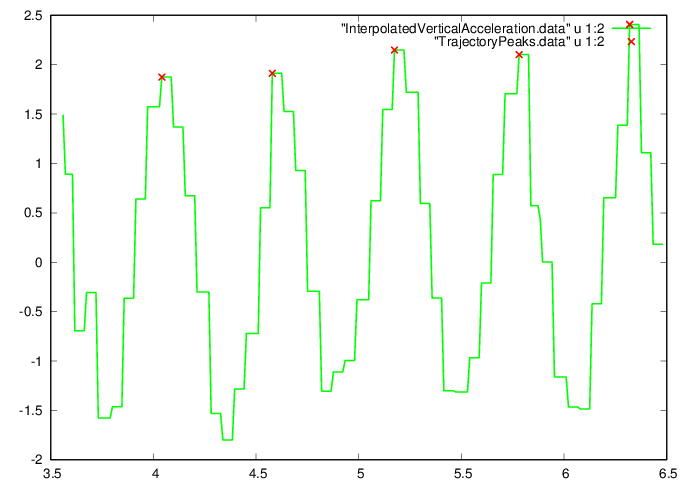
2.3Splice data into multiple periods
Find peak vertical accelerations.
octave>
|
[aPeak, iPeak] =
findpeaks(aGi-min(aGi),"MinPeakHeight",1.,"MinPeakDistance",nT/3);
fid=fopen('TrajectoryPeaks.data','w');
ta = [tGi(iPeak)' (aPeak+min(aGi))'];
fprintf(fid,'%f %f\n',ta');
fclose(fid);
|
octave>
|
nPeriods = max(size(iPeak))-1
|
Plot the acceleration peaks.
GNUplot]
|
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "red" lw 3
set style line 2 lt 2 lc rgb "green" lw 3
set style line 3 lt 2 lc rgb "blue" lw 3
plot "InterpolatedVerticalAcceleration.data" u
1:2 w l ls 2, "TrajectoryPeaks.data" u 1:2 w p
ls 1
|
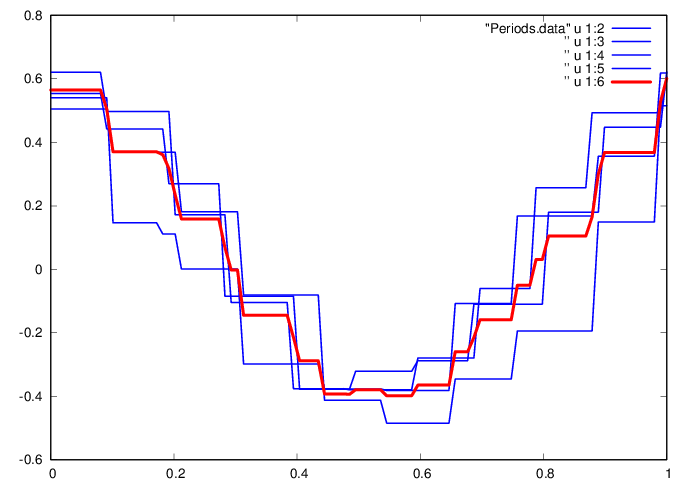
Extract the periods
octave>
|
nT = (shift(iPeak,-1)-iPeak+1)(1:nPeriods)
|
octave>
|
nTmax = max(nT);
tT = zeros([nTmax,nPeriods]);
aT = zeros([nTmax,nPeriods]);
TT = zeros([nPeriods,1]);
i=1; while(i<=nPeriods)
tT(1:nT(i),i) = tGi(iPeak(i):iPeak(i+1));
aT(1:nT(i),i) = aGi(iPeak(i):iPeak(i+1));
TT(i) = tT(nT(i),i) - tT(1,i);
i++;
endwhile;
disp(TT');
|
0.53811 0.59536 0.60681 0.53811
octave>
|
i=1; while(i<=nPeriods)
tT(1:nT(i),i) = tT(1:nT(i),i) - tT(1,i);
tT(1:nT(i),i) = tT(1:nT(i),i)/TT(i);
amp = max(aT(1:nT(i),i)) - min(aT(1:nT(i),i));
aT(1:nT(i),i) = aT(1:nT(i),i)/amp;
i++;
endwhile;
|
octave>
|
nTi=100;
dt=1./(nTi-1); ti=(0:nTi-1)*dt; ti=ti';
aTi=zeros([nTi,nPeriods]); g=zeros([nTi,1]);
i=1; while(i<=nPeriods)
ai =
interp1(tT(1:nT(i),i),aT(1:nT(i),i),ti',"nearest");
aTi(:,i) = ai;
g = g + ai';
i++;
endwhile;
g = g/nPeriods;
g = g/(max(g)-min(g));
|
octave>
|
fid=fopen('Periods.data','w');
ta = [ti aTi g];
fprintf(fid,'%f %f %f %f %f %f\n',ta');
fclose(fid);
fid=fopen(strcat(strcat('AveragePeriod.',LastName),'.data'),'w');
ta = [ti g];
fprintf(fid,'%f %f \n',ta');
fclose(fid);
|
GNUplot]
|
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "red" lw 6
set style line 2 lt 2 lc rgb "green" lw 3
set style line 3 lt 2 lc rgb "blue" lw 3
plot "Periods.data" u 1:2 w l ls 3, ” u
1:3 w l ls 3, ” u 1:4 w l ls 3, ” u 1:5 w l ls
3, ” u 1:6 w l ls 1
|
Question 5. What are the potential
drawbacks of defining an “average” gait? Consider the
limiting cases of too few or very many sample periods.
For too many periods, differences in the path (climbing, turning,
descending) can mask the average gait assumed to be specific to a
person. For, say, a single period, the gait might not be typical,
e.g., due to a cough or irregularity in the path. It would be best to
more carefully control the path in order to identify the person, e.g.,
limit data to walking a straight path of 10 meters.
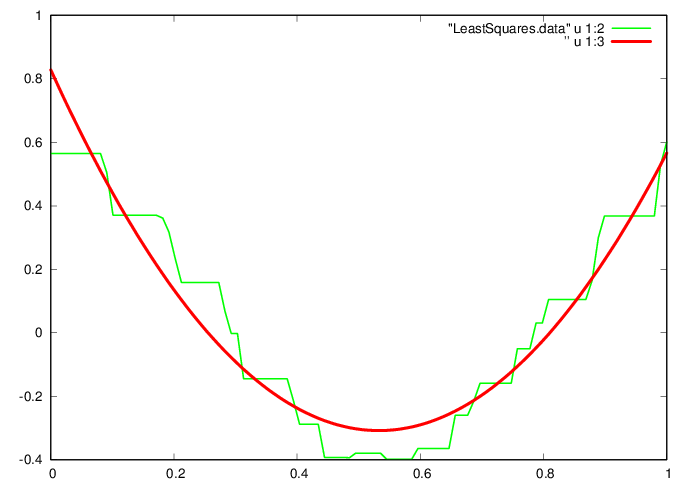
2.4Least squares
Seek a more economical representation of the average gait waveform,
currently stored as a vector
of the vertical acceleration values at times within the vector .
For example, consider approximating the waveform by a parabola ,
leading to the least squares problem
|
(1) |
A solution is found by projection onto the column space of ,
|
(2) |
octave>
|
L=[ti.^0 ti ti.^2]; [Q,R]=qr(L,0); [size(Q); size(R)]
|
octave>
|
p = L*c;
fid=fopen('LeastSquares.data','w');
ta = [ti g p];
fprintf(fid,'%f %f %f\n',ta');
fclose(fid);
|
GNUplot]
|
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "red" lw 6
set style line 2 lt 2 lc rgb "green" lw 3
set style line 3 lt 2 lc rgb "blue" lw 3
plot "LeastSquares.data" u 1:2 w l ls 2, ”
u 1:3 w l ls 1
|
Question 6. What gait information is
lost in the least squares approximation?
Think of the motion as being produced by a triple articulated
structure (at knees, hips, shoulders). Through a quadratic
approximation, the above are combined into a single articulation,
hence the acceleration profile provided by specific lengths of shins,
thighs, backbone are lost.
2.5Min-max
An alternative representation is through a linear combination of
Chebyshev polynomials,
known to be a good approximation of the min-max polynomial of the data.
The coefficient vector
is more difficult to find by comparison to the least squares case, and
is carried out through a procedure known as the exchange algorithm,
implemented in Octave by the polyfitinf function.
octave>
|
d=polyfitinf(2,nTi,0,ti,g,5.0E-7,nTi)
|
octave>
|
q = polyval(d,ti);
fid=fopen('MinMax.data','w');
ta = [ti g q];
fprintf(fid,'%f %f %f\n',ta');
fclose(fid);
|
GNUplot]
|
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "red" lw 6
set style line 2 lt 2 lc rgb "green" lw 3
set style line 3 lt 2 lc rgb "blue" lw 6
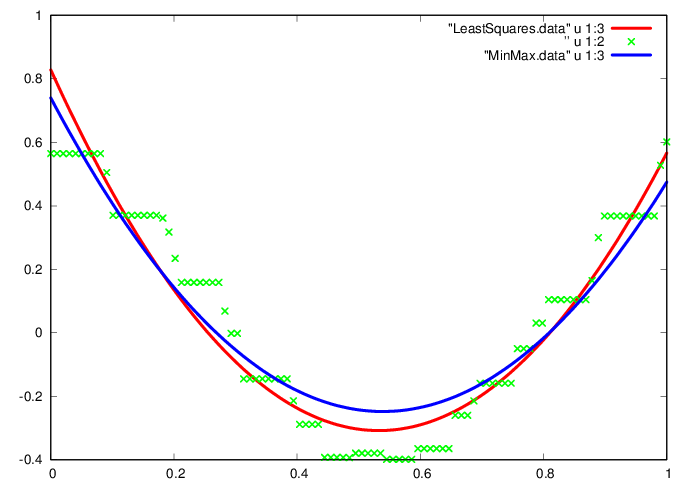
plot "LeastSquares.data" u 1:3 w l ls 1, ”
u 1:2 w p ls 2, "MinMax.data" u 1:3 w l ls 3
|
Question 7. Which gait approximation
is better suited to walker identification, least squares or min-max?
Explain your reasoning.
Min-max is suited to approximation that minimizes a presumed
“maximal” error. The problem is that such a maximal error
cannot be defined in this case, whereas, for example, it is
straightforward to define in the approximation of an analytical
function such as sin(x). The least-squares approximation is better in
this case.
Save the coefficients of the two representations (least-squares and
Chebyshev)
octave>
|
fid=fopen(strcat(strcat('PolyCoef.',LastName),'.data'),'w');
ta = [c d'];
fprintf(fid,'%f %f\n',ta');
fclose(fid);
|