|
Carry out analysis of the cell-phone accelerometer data according to the following template, answering the questions. The objective of this homework is to familiarize yourself with some linear algebra and numerical analysis techniques that are commonly encountered in data analysis.
Turn in this TeXmacs file and the two data files AveragePeriod.LastName.data, PolyCoef.LastName.data. The results contained in these files will be used in subsequent topological data analysis.
A first step in processing the data acquired from the cell phone is to carry out some basic qualitative analysis, shown here using Octave (Matlab clone).
octave>
dir='/home/student/courses/MATH590/NUMdata';
chdir(dir);
LastName = 'Mitran';
data=csvread(strcat(LastName,'.csv'));
[m,d] = size(data); disp([m d]);
18841 8
octave>
data(1:10,:)
octave>
Question
Identify to which directions (forward walking, up and down,
sideways) each column corresponds
Identify the physical units used in the measurements
Are the values reasonable?
Write data to a file.
octave>
[t,iu]=unique(data(:,1));
mu=max(size(iu));
raddeg=pi/180;
a=data(iu,2:4); epsilon=data(iu,5:7)/raddeg;
fid=fopen(strcat(LastName,'.data'),'w');
fprintf(fid,'%f %f %f %f %f %f %f\n',[t a epsilon]');
fclose(fid);
octave>
Change the file plotted to your data.
GNUplot]
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "red" lw 3
set style line 2 lt 2 lc rgb "green" lw 3
set style line 3 lt 2 lc rgb "blue" lw 3
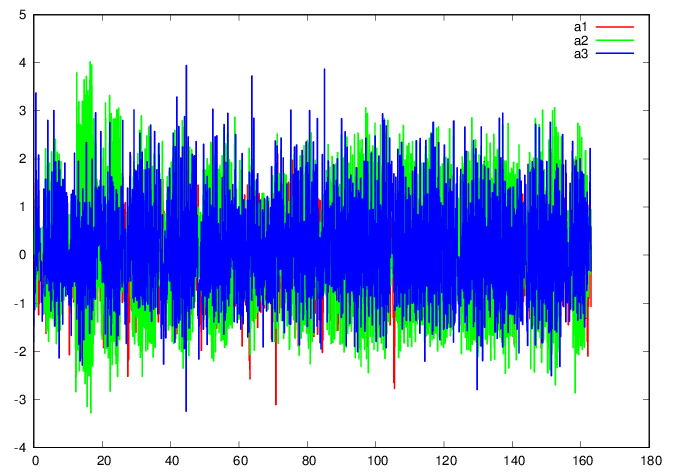
plot 'Mitran.data' u 1:2 w l ls 1 title "a1",
” u 1:3 w l ls 2 title "a2", ” u 1:4
w l ls 3 title "a3"
GNUplot]
GNUplot]
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "red" lw 3
set style line 2 lt 2 lc rgb "green" lw 3
set style line 3 lt 2 lc rgb "blue" lw 3
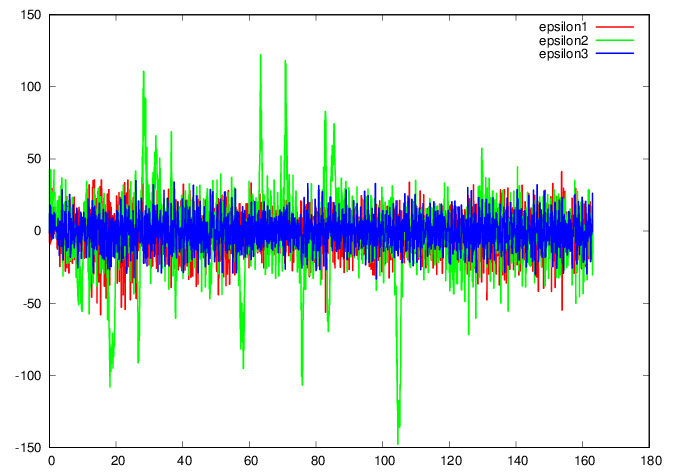
plot 'Mitran.data' u 1:5 w l ls 1 title
"epsilon1", ” u 1:6 w l ls 2 title
"epsilon2", ” u 1:7 w l ls 3 title
"epsilon3"
GNUplot]
Question
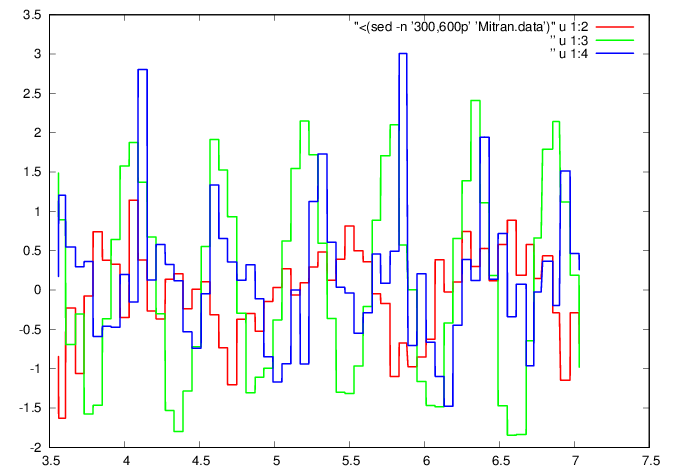
Modify the data window as needed
GNUplot]
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "red" lw 3
set style line 2 lt 2 lc rgb "green" lw 3
set style line 3 lt 2 lc rgb "blue" lw 3
plot "<(sed -n '300,600p' 'Mitran.data')" u
1:2 w l ls 1, ” u 1:3 w l ls 2, ” u 1:4 w l ls
3
GNUplot]
octave>
iG0=300; nG=256; iG1=iG0+nG-1;
tG=t(iG0:iG1); aG=a(iG0:iG1,:);
tG0=tG(1); tG1=tG(nG); dt=(tG1-tG0)/nG;
tGi=tG0+(0:nG-1)*dt;
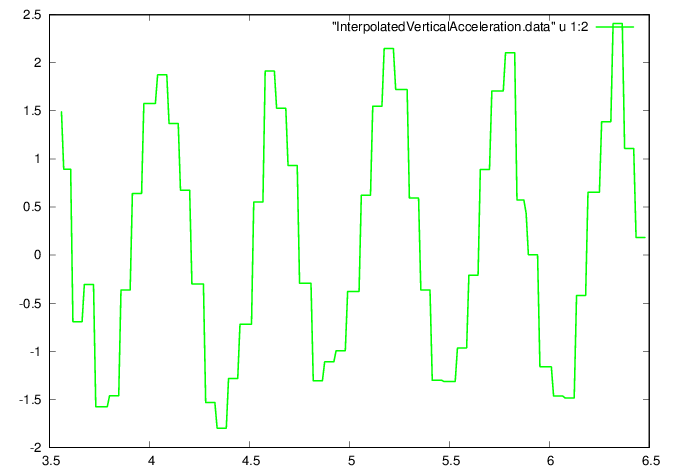
aGi=interp1(tG',aG(:,2)',tGi);
fid=fopen('InterpolatedVerticalAcceleration.data','w');
ta = [tGi' aGi'];
fprintf(fid,'%f %f\n',ta');
fclose(fid);
octave>
GNUplot]
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "green" lw 3
plot "InterpolatedVerticalAcceleration.data" u
1:2 w l ls 1
GNUplot]
Question
octave>
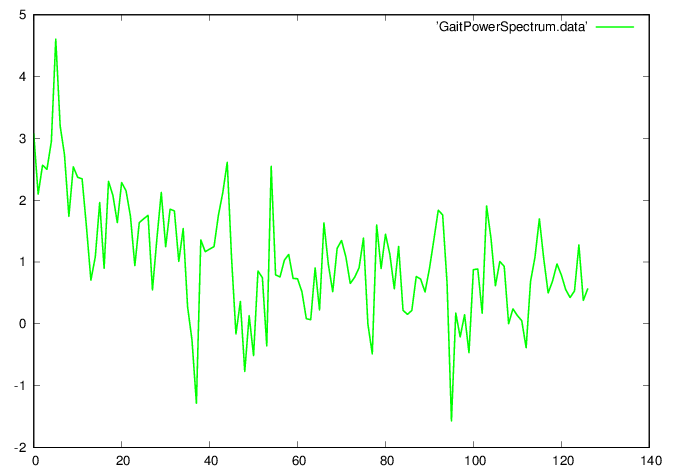
AGi=fft(aGi); PAGi = log10(AGi.*conj(AGi));
fid=fopen('GaitPowerSpectrum.data','w');
fprintf(fid,'%f\n',PAGi(1:nG/2-1));
fclose(fid);
octave>
GNUplot]
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "green" lw 3
plot 'GaitPowerSpectrum.data' w l ls 1
GNUplot]
octave>
[val,idx] = max(PAGi); disp([val idx]);
4.6046 6.0000
octave>
TG = (tG1-tG0)/(idx-1)
octave>
nT=floor(max(size(aGi))/(idx-1))
octave>
Question
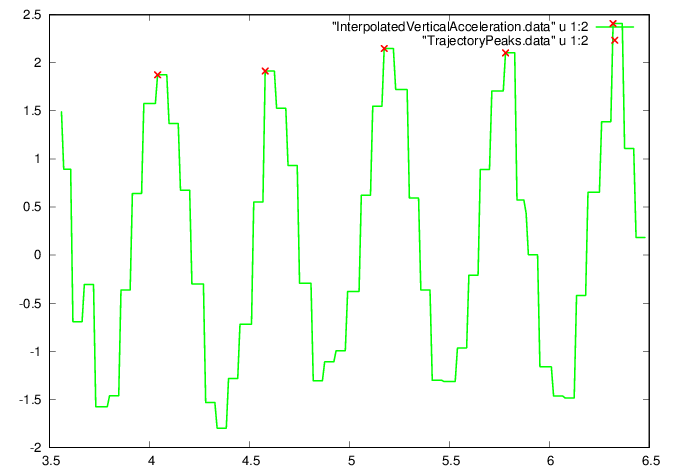
Find peak vertical accelerations.
octave>
[aPeak, iPeak] =
findpeaks(aGi-min(aGi),"MinPeakHeight",1.,"MinPeakDistance",nT/3);
fid=fopen('TrajectoryPeaks.data','w');
ta = [tGi(iPeak)' (aPeak+min(aGi))'];
fprintf(fid,'%f %f\n',ta');
fclose(fid);
octave>
nPeriods = max(size(iPeak))-1
octave>
Plot the acceleration peaks.
GNUplot]
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "red" lw 3
set style line 2 lt 2 lc rgb "green" lw 3
set style line 3 lt 2 lc rgb "blue" lw 3
plot "InterpolatedVerticalAcceleration.data" u
1:2 w l ls 2, "TrajectoryPeaks.data" u 1:2 w p
ls 1
GNUplot]
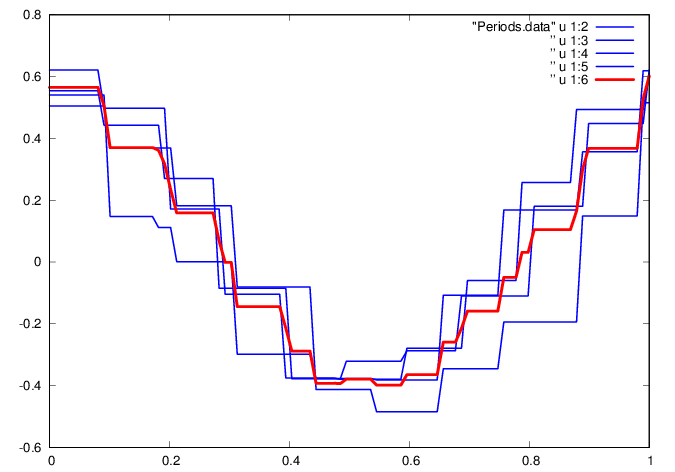
Extract the periods
octave>
nT = (shift(iPeak,-1)-iPeak+1)(1:nPeriods)
octave>
nTmax = max(nT);
tT = zeros([nTmax,nPeriods]);
aT = zeros([nTmax,nPeriods]);
TT = zeros([nPeriods,1]);
i=1; while(i<=nPeriods)
tT(1:nT(i),i) = tGi(iPeak(i):iPeak(i+1));
aT(1:nT(i),i) = aGi(iPeak(i):iPeak(i+1));
TT(i) = tT(nT(i),i) - tT(1,i);
i++;
endwhile;
disp(TT');
0.53811 0.59536 0.60681 0.53811
octave>
i=1; while(i<=nPeriods)
tT(1:nT(i),i) = tT(1:nT(i),i) - tT(1,i);
tT(1:nT(i),i) = tT(1:nT(i),i)/TT(i);
amp = max(aT(1:nT(i),i)) - min(aT(1:nT(i),i));
aT(1:nT(i),i) = aT(1:nT(i),i)/amp;
i++;
endwhile;
octave>
nTi=100;
dt=1./(nTi-1); ti=(0:nTi-1)*dt; ti=ti';
aTi=zeros([nTi,nPeriods]); g=zeros([nTi,1]);
i=1; while(i<=nPeriods)
ai =
interp1(tT(1:nT(i),i),aT(1:nT(i),i),ti',"nearest");
aTi(:,i) = ai;
g = g + ai';
i++;
endwhile;
g = g/nPeriods;
g = g/(max(g)-min(g));
octave>
fid=fopen('Periods.data','w');
ta = [ti aTi g];
fprintf(fid,'%f %f %f %f %f %f\n',ta');
fclose(fid);
fid=fopen(strcat(strcat('AveragePeriod.',LastName),'.data'),'w');
ta = [ti g];
fprintf(fid,'%f %f \n',ta');
fclose(fid);
octave>
GNUplot]
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "red" lw 6
set style line 2 lt 2 lc rgb "green" lw 3
set style line 3 lt 2 lc rgb "blue" lw 3
plot "Periods.data" u 1:2 w l ls 3, ” u
1:3 w l ls 3, ” u 1:4 w l ls 3, ” u 1:5 w l ls
3, ” u 1:6 w l ls 1
GNUplot]
Question
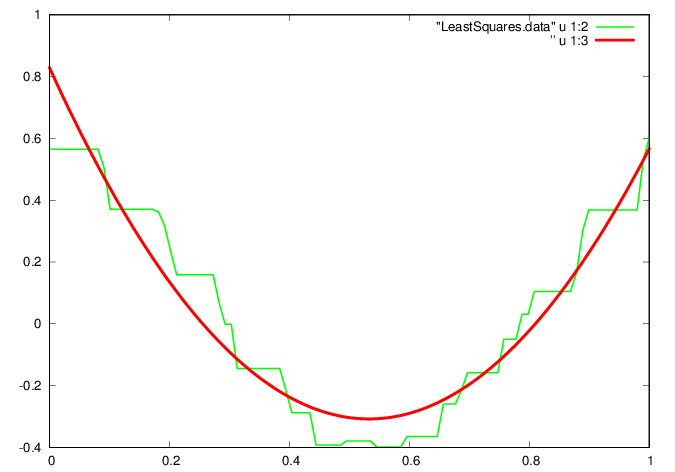
Seek a more economical representation of the average gait waveform, currently stored as a vector of the vertical acceleration values at times within the vector . For example, consider approximating the waveform by a parabola , leading to the least squares problem
| (1) |
A solution is found by projection onto the column space of ,
| (2) |
octave>
L=[ti.^0 ti ti.^2]; [Q,R]=qr(L,0); [size(Q); size(R)]
octave>
c = R \ Q'*g
octave>
p = L*c;
fid=fopen('LeastSquares.data','w');
ta = [ti g p];
fprintf(fid,'%f %f %f\n',ta');
fclose(fid);
octave>
GNUplot]
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "red" lw 6
set style line 2 lt 2 lc rgb "green" lw 3
set style line 3 lt 2 lc rgb "blue" lw 3
plot "LeastSquares.data" u 1:2 w l ls 2, ”
u 1:3 w l ls 1
GNUplot]
Question
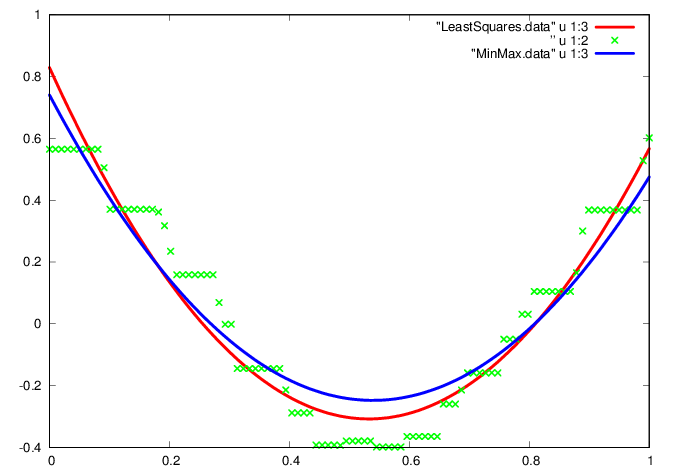
An alternative representation is through a linear combination of Chebyshev polynomials,
known to be a good approximation of the min-max polynomial of the data. The coefficient vector is more difficult to find by comparison to the least squares case, and is carried out through a procedure known as the exchange algorithm, implemented in Octave by the polyfitinf function.
octave>
d=polyfitinf(2,nTi,0,ti,g,5.0E-7,nTi)
octave>
q = polyval(d,ti);
fid=fopen('MinMax.data','w');
ta = [ti g q];
fprintf(fid,'%f %f %f\n',ta');
fclose(fid);
octave>
GNUplot]
cd '/home/student/courses/MATH590/NUMdata'
set terminal postscript eps enhanced color
set style line 1 lt 2 lc rgb "red" lw 6
set style line 2 lt 2 lc rgb "green" lw 3
set style line 3 lt 2 lc rgb "blue" lw 6
plot "LeastSquares.data" u 1:3 w l ls 1, ”
u 1:2 w p ls 2, "MinMax.data" u 1:3 w l ls 3
GNUplot]
Question
Save the coefficients of the two representations (least-squares and Chebyshev)
octave>
fid=fopen(strcat(strcat('PolyCoef.',LastName),'.data'),'w');
ta = [c d'];
fprintf(fid,'%f %f\n',ta');
fclose(fid);
octave>