Solve the problems for your appropriate course track. Problems probe
understanding of the course concepts. Formulate your answers clearly and
cogently. Sketch out an approach on scratch paper first. Then briefly
transcribe the approach to the answer you turn in, followed by
appropriate calculations and conclusions, within allotted time. Use
concise, complete English sentences in the description of your approach.
Each question is meant to be completely answered and transcribed from
proof to final copy within thirty minutes. Concentrate foremost on clear
exposition of the concept underlying your approach.
-
Consider the ballistic missile trajectory problem of national
defense interest. From measurements of the positions
at successive times ,
predict the target reached at time .
Formulate a procedure to predict ,
assuming the missile is known to follow a parabolic trajectory.
Solution. The parabolic trajectory is expressed through a quadratic
approximant
The coefficients
are the solution of the least squares problem
with
To solve the least squares problem:
-
Construct a quadrature formula for integrals of the form
Solution. Assuming sampling data , find the weights
of the quadrature
by imposing the moment conditions
a linear system with a Vandermonde system matrix
The moments are analytically evaluated through integration by parts
-
Find the best approximant in the least squares sense of
within .
Solution. Orthonormalize using Gram-Schmidt in a Hilbert space
with scalar product
Obtain the orthonormal set .
The least squares approximant is
Gram-Schmidt calculations:
Coefficient of
on orthonormal basis (use fact that sin is odd,
are even)
The best approximant is
-
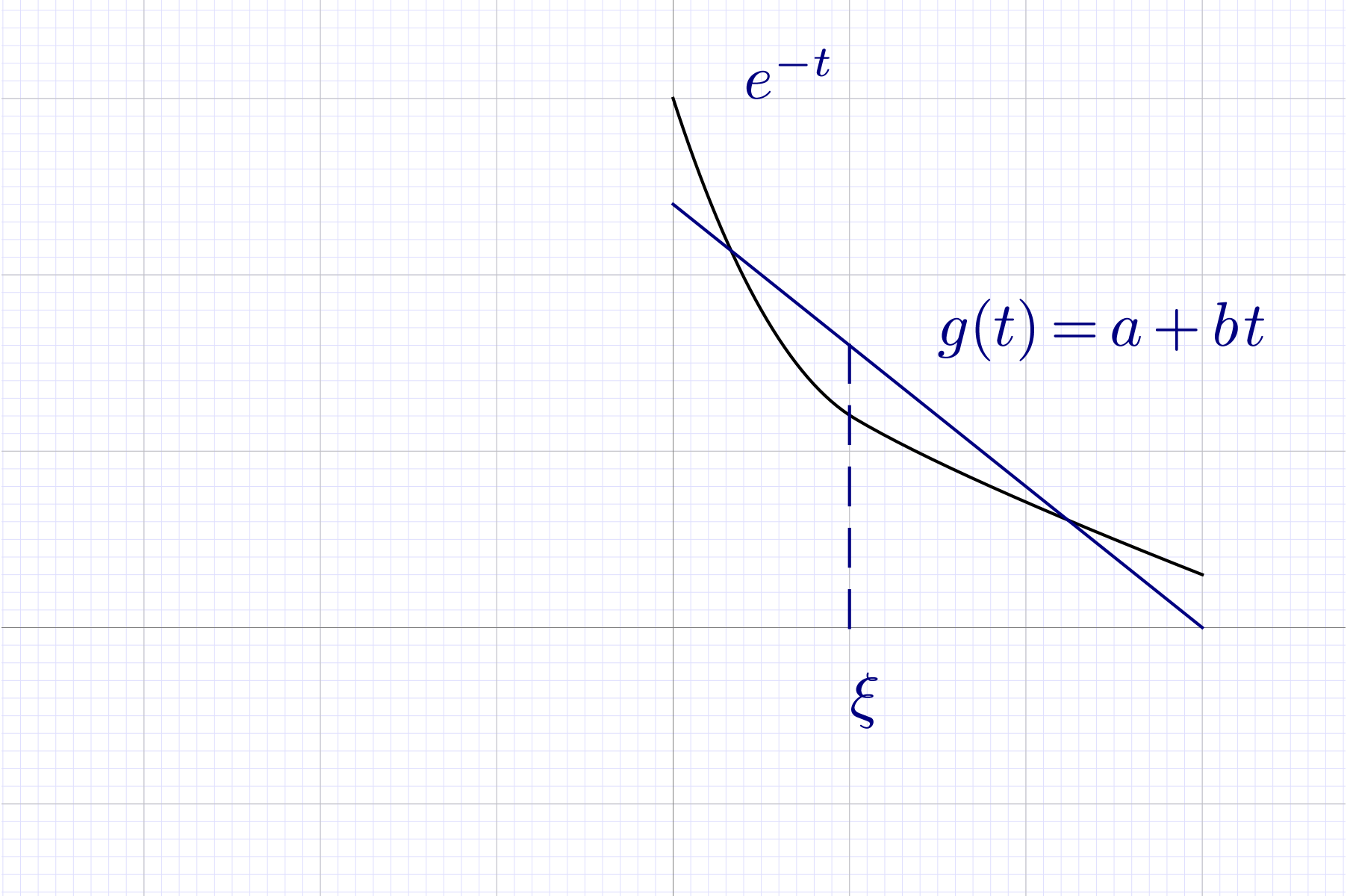
Find the best inf-norm approximant of ,
by a first-degree polynomial.
By equioscillation theorem
satisfies the alternating difference conditions
and the stationarity condition
These lead to the system
Eliminaing
leads to a system for
with solution
defining the best inf-norm linear approximant of
-
Propose a scheme to solve the integro-differential equation
for .
Apply all relevant course concepts to analyze the scheme.
Solution. Consider an equidistant sampling at ,
,
and discretize the derivative through forward differencing (forward
Euler, second-order one-step error)
Over approximate the integrand the scond-order
accurate trapezoid rule (to maintain Euler one-step error)
The above scheme has one step error of ,
overall error of
-
Construct an approximant of
where
is a symmetric positive definite matrix-valued function of .
Solution. Many approaches are possible; the question tests
understanding of the overall course material to the level of
proposing a viable technique.
Simplest approach. s.p.d.
implies it is unitarily diagonalizable, i.e., ,
,
such that
By definition
Introduce a piecewise constant approximation of
for (0-degree -spline
basis). Then
Extension to a piecewise linear approximation
is not immediate since
is not guaranteed to be s.p.d.
Differential system approach. Recall that
has solution ,
and
has solution
With , ODE
system
has solution
Column of
is obtained as
i.e., the action of
on the column
vector of the identity matrix. This can be obtained by any numerical
scheme to solve the ODE system (1) starting from initial condition
,
amd adding
to the result.
-
Construct a quadrature formula for integrals of the form
where
is a symmetric negative definite matrix-valued function of , and
has Riemann integrable components.
Solution. admits an orthogonal
diagonalization
with , ,
and the matrix exponential is
Define the scalar product
Approximate on the basis
and obtain
Denote by the
average value of , such that, by mean value theorem
Interpret above as stating that standard Gauss-Laguerre quadrature
formulas
are applicable to the individual components of
using scale transformation
-
Find the best approximant of
within ,
in a space with scalar product
and norm
where
is symmetric positive definite. Verify the correspondence principle
that for
standard least-squares projection is obtained.
Solution. Construct an orthogonal factorization
using Gram-Schmidt and the specified scalar product
The matrix satisfies
orthogonality relationship
The residual
is orthogonal to
The best approximant is .
For ,
the Euclidean projection
is obtained.
-
Find the best inf-norm approximant of ,
by a first-degree polynomial.
Solution. The approximation error is
and the problem is stated as
Since
leads to infinitely large error, simplify the problem to
The derivative
has a root at
at which point
Equioscillation theorem is satisfied by
-
Consider the half-derivative operator
defined as
where
is the derivative operator. Propose a numerical scheme to evaluate
that can be used to solve fractional differential equations.
Solution. The differentiation operator
is approximated to order in terms of
the backward finite difference operator
by
where is the argument translation
operator.
Consider
and apply the generalized binomial expansion
for ,
,
.
Obtain
Apply the above to fractional equation ,
and obtain the scheme