Recall that the relative condition number of a mathematical problem characterizes the amplification by of perturbations in its argument
Linear combination. The basic operation of linear combination , , seen as the problem has the condition number
The matrix norm property can be used to obtain
leading to
where is the condition number of the matrix . If is of full rank with , the 2-norm condition number is given by the ratio of largest to smallest singular values.
By convention, if is singular, the condition number .
Coordinate transformation. For of full rank, the coordinates of vector expressed in the basis can be transformed its coordinates in the basis by solving the linear system , with the solution (so written formally, even though the inverse is almost never explicitly computed). This is simply another linear combination of the columns of , hence the problem , again has a condition number bounded by the condition number of the matrix .
Operator perturbation. Instead of changing the input data as above, the linear mapping represented by the matrix might itself be perturbed. Two mathematical problems may now be formulated:
For fixed . Perturbation of the input induces perturbation of in order for to be kept fixed
Using , and assuming that is negligible gives
hence the relative condition number is
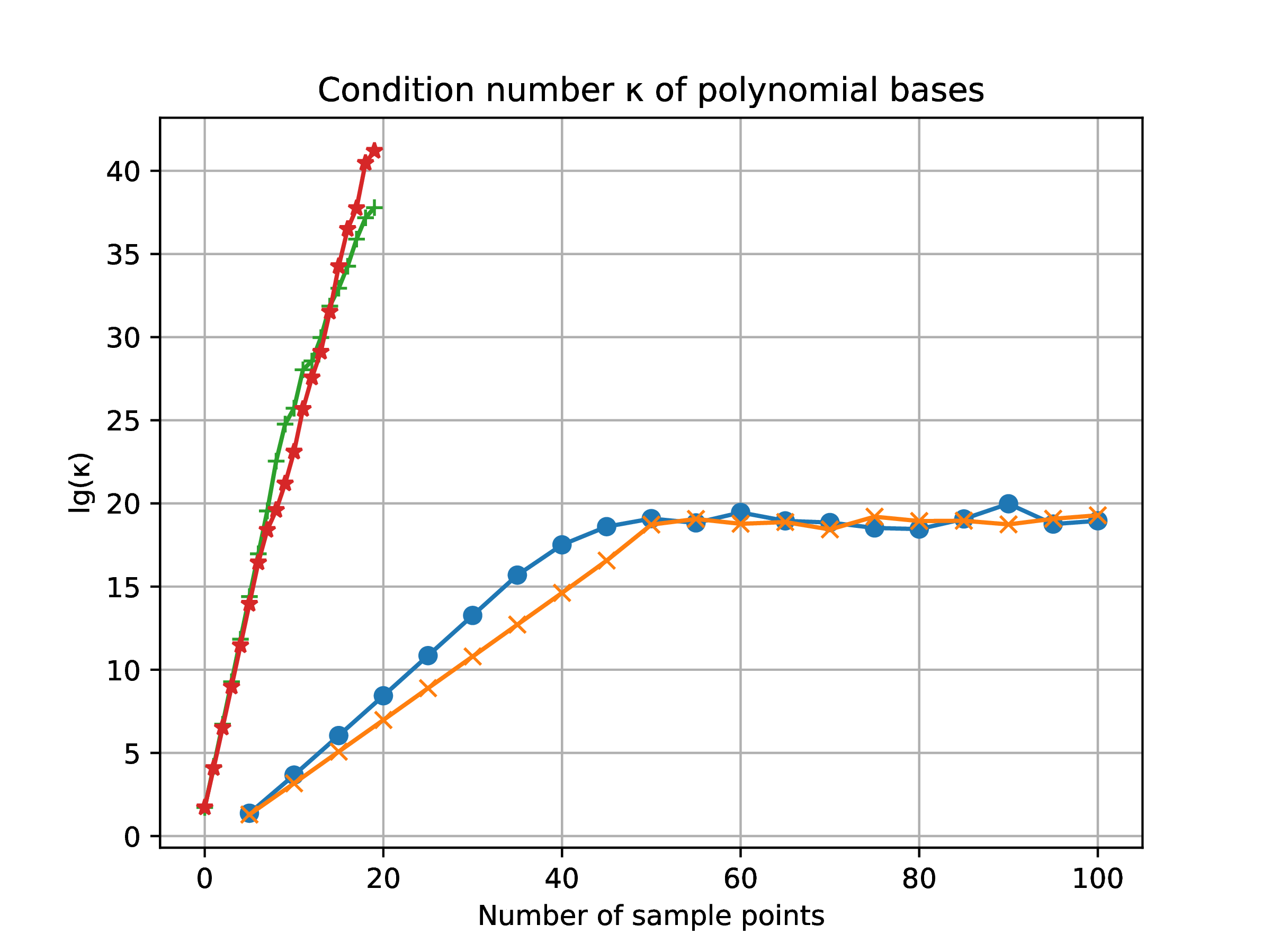
For all above linear algebra problems the condition number is bounded by the associated matrix condition number. Unitary matrices have , and define an orthonormal basis for . A rank-deficient matrix has , and corresponds to a linearly dependent vector set . The behavior of many numerical approximation procedures based upon linear combinations is determined by condition number of the basis set.
Monomial basis with uniform sampling. Sampling the monomial basis on interval at , leads to the Vandermonde matrix
an extremely ill-conditioned matrix (Fig. ). This can readily be surmised from the example , , in which case for large the last columns of become ever more colinear to the same vector. Series expansions based on the monomials such as the Taylor series
are highly sensitive to pertubations, small changes in lead to large changes in the coordinates .
∴ |
function Vandermonde(a,b,m)
t=LinRange(a,b,m); v=ones(m,1); V=copy(v)
for j=2:m
v = v .* t; V=[V v]
end
return V
end; |
∴ |
Monomial basis with Chebyshev sampling. Changing the sampling so that points are clustered towards the interval endpoints reduces the condition number at fixed number of sampling points , but the same limiting behavior for large is obtained.
∴ |
function VandermondeC(m)
δ=π/(2*m); ϴ=LinRange(δ,π-δ,m)
t=cos.(ϴ)
v=ones(m,1); V=copy(v)
for j=2:m
v = v .* t; V=[V v]
end
return V
end; |
∴ |
Triangular basis with uniform sampling. -factorization of the monomial basis leads to a different family of polynomials, known as a triangular basis
where are known as the nodes of the system. These can be chosen to uniformly sample an interval. As to be expected, applying a sequence of non-unitary linear transformations onto an ill-conditioned basis yields even worse conditioning.
∴ |
function Triangular(a,b,m)
x=LinRange(a,b,m); T=ones(m,1); Tj=copy(T); t=copy(x)
for j=2:m
Tj = Tj .* (t .- x[j-1]); T=[T Tj]
end
return T
end; |
∴ |
Triangular basis with Chebyshev sampling. Adopting Chebyshev sampling ameliorates the conditioning, but only marginally.
The Gram-Schmidt procedure constructs an orthogonal factorization by linear combinations of the column vectors of , ,
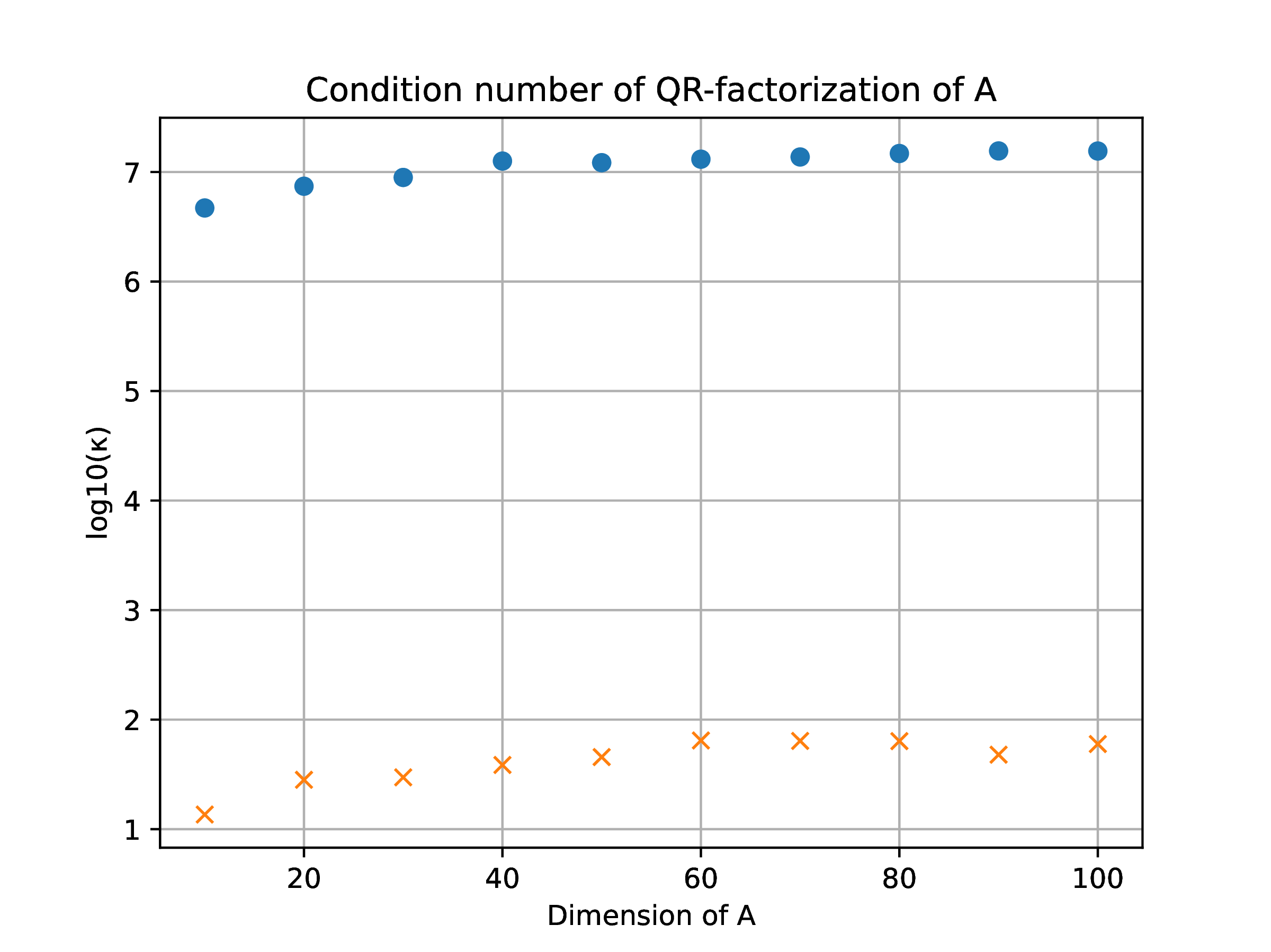
In exact arithmetic by construction, and , but the sequence of multiplications with might amplify perturbations in (due for example to floating point representation errors or inherent uncertainty in knowledge of ). The problem has condition number
and numerical experimentation (Fig. 2) readily exhibits large condition numbers.
An alternative approach is to obtain an orthogonal factorization through unitary transformations
Unitary transformations do not modify vector 2-norms or relative orientations
and are hence said to be isometric. In Euclidean space reflections and rotations are isometric.
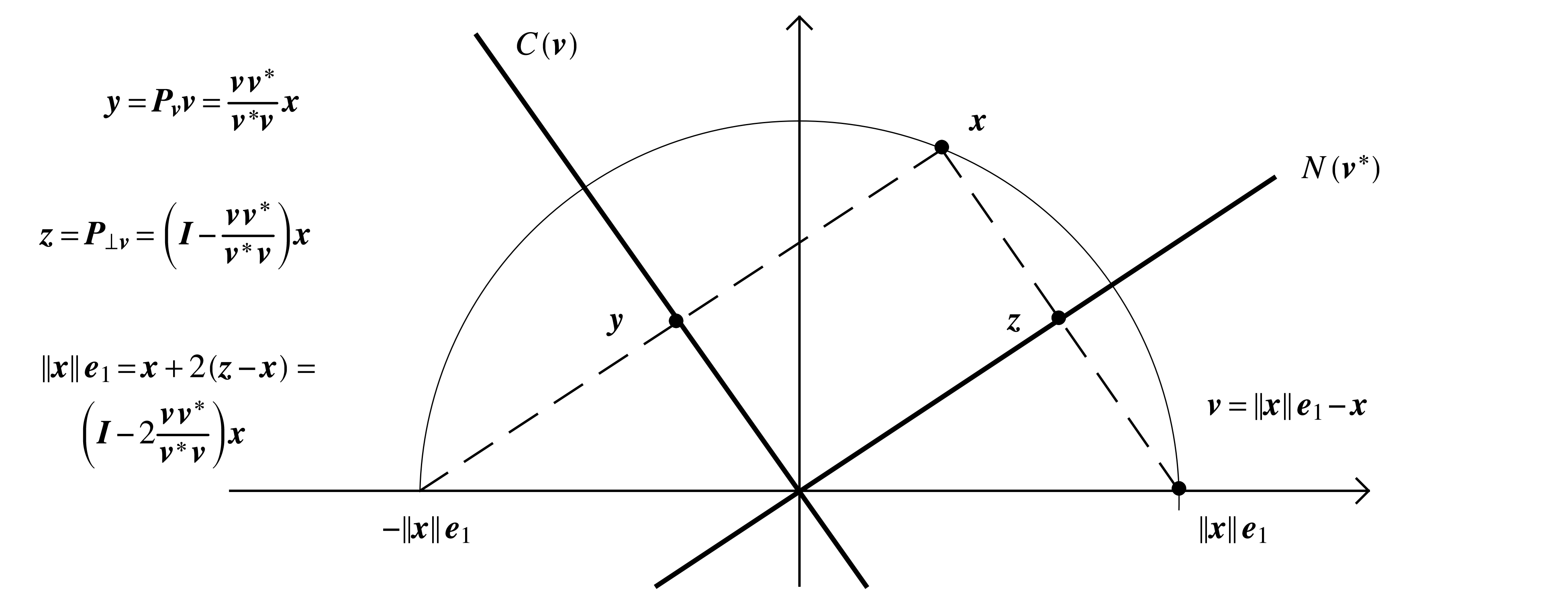
Construction of an isometric reflection transformation suitable for a factorization is represented in Fig. 3. Let vector represent the portion of the column from the diagonal downwards in stage of reduction of to upper triangular form
The next stage of in reduction to upper triangular form is the isometric transformation of into , with the unit vector along the first direction. With , , the projection of onto the span of , is
and its complementary projector onto is
The reflector transforming into is obtained by doubling the above displacements, and is known as a Householder reflector
Of the two possibilities , the choice
avoids loss of floating accuracy . For , .
The resulting Householder -factorization is given
Input:
for
; for
|
|
Note that the above implementation does not return the matrix, but rather the reflectors from which can be reconstructed if needed. Usually though, the matrix itself is not required, but rather the product which can readily be evaluated as . The Householder reflector algorithm is typically the default procedure in -factorizations implemented in software systems, and as seen in (Fig. 2), leads to much better conditioning.
An alternative approach to orthogonal factorization utilizes isometric rotation transformations of the form
with the rotation angle chosen to nullify the subdiagonal element ,
Composition of repeated rotations can be organized to lead to an upper triangular matrix
Whereas Householder reflectors work on entire vectors, Givens rotators nullify individual subdiagonal elements. For full matrices Householder reflectors typically require fewer floating point operations, but the special structure of a sparse matrix is better exploited by use of Givens rotators.
Input:
for for
; for ;
|
|
As in the Householder implementation the above implementation returns data to reconstruct if needed.