-
Construct the polynomial interpolant of data in Lagrange
form.
Solution. With ,
, the
cubic Lagrange polynomial interplant is
-
Construct the Newton form of the polynomial interpolant of the above
data set, presenting the table of divided differences.
Solution. Table of divided differences
leads to Newton interpolant
Verify:
-
Efficiently evaluate the Newton form of the polynomial interpolant
determined above at ,
using Horner's scheme. Present a pseudo-code algorithm.
Solution. For known divided differences on the diagonal of
the table, an scheme is
-
Replace the sampling points ,
in the data set so as to minimize
the interpolation error over the interval .
Solution. The error is minized for the Chebyshev
points, i.e., roots of ,
scaled to cover the interval by .
Roots of
are , for ,
with ,
.
-
Construct the Hermite interpolant of data in Newton
form.
Solution. The table of divided differences with
repetitions
leads to the cubic polynomial
Verify
-
Construct the Hermite interpolant of the above data in the Lagrange
form
where ,
,
,
.
Solution. Repeat the divided difference table with
symbols for function, derivative values
giving
Gather terms
Identify and verify conditions
-
Present a spline interpolant of data
set , ,
where the restriction of to interval
is of the form
Solution. Impose interpolation conditions in
function values
The above specify
conditions for
parameters. Impose continuity of function derivative
for a total of
condition. One additional condition is required, e.g.,
or (derivative extrapolation).
-
Find the best inf-norm approximants of ,
by polynomials of degree .
Solution. For ,
,
is
monotone on and error extrema are
obtained at endpoints of compact interval . By equioscillation theorem, .
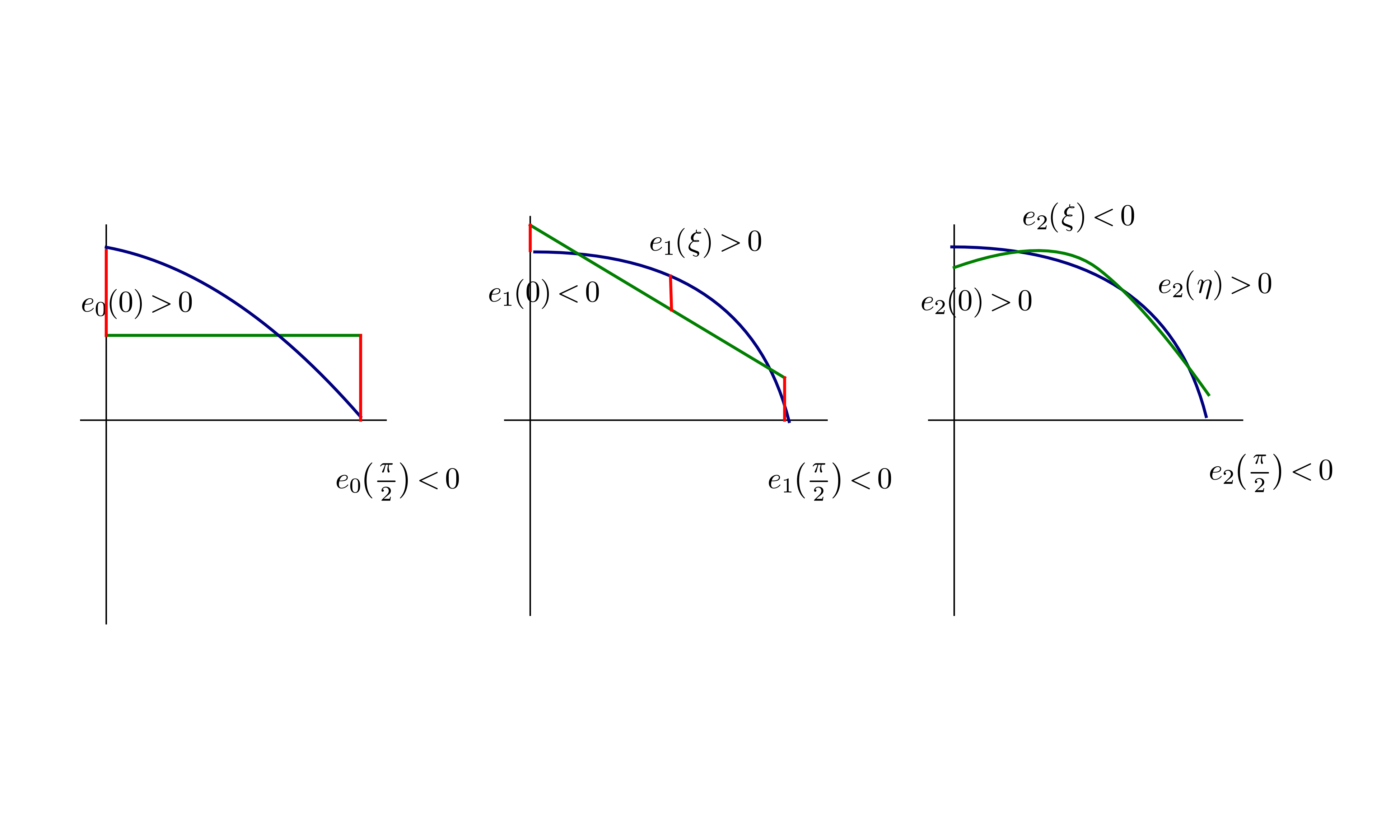
For ,
error
has two extrema ,
at endpoints and a local extremum where .
Impose equioscillation conditions
giving
and .
For ,
error
has two extrema ,
at endpoints. The local extremum condition
is satisfied at two roots
(consider best approximant of
by a polynomial of degree 1 with similar solutions as that for ).
Apply equioscillation theorem
The above requires a numerical solution.