Determine the interpolating polynomial of
using equidistant nodes in the interval , for .
Solution. Start by defining a function to sample
∴ |
function sample(n,f,a,b) x=LinRange(a,b,n); y=f.(x) return[x y] end; |
∴ |
f(x)=sin(cos(x))+cos(sin(x)); |
∴ |
TeXmacs note: Insert->Fold->Folded->Standard is used here to display the above code, but hide the tests of the code.
Test:
∴ |
xy=sample(3,f,-π,π) |
(1)
∴ |
x=xy[:,1]; y=xy[:,2]; |
∴ |
Gather all interpolation related code into an Interpolation661 module that can be extended and re-used. Iterative editing of the Interpolation661 module is aided by the Revise, InteractiveUtils packages. Add these to your environment through:
using Pkg; Pkg.add("Revise")
and place
using Revise, InteractiveUtils ENV["JULIA_EDITOR"]="geany"
in your TeXmacs tmrepl.jl startup file, or your Julia configuration startup. The last line above sets the editor invoked by the Julia edit() function to be geany.
TeXmacs note: The code within the Interpolation661 module is included in this document through Insert->Link->Include..., and the insertion can be updated (manually) through Tools->Update->Inclusions. Also define a base directory for saving images.
∴ |
import Pkg |
Busy…
∴ |
dir=homedir()*"/courses/MATH661/images/"; |
∴ |
Pkg.add(url="/home/student/courses/MATH661/packages/Interpolation661 |
In each case:
-
Find the coefficients in the monomial basis by solving the system , where . Use the Julia backslash operator.
Solution. Allocate space to store the coefficients for all
∴
kmn=2; kmx=5; kr=2:5; nRows=2^kmx; nCols=kmx-kmn+1;
∴
a=zeros(nRows,nCols);
∴
Define a function to sample -, the Vandermonde matrix, and determine
∴
function aCalc(f,n) xy = sample(n,f,-π,π); x = xy[:,1]; y = xy[:,2] V = Vandermonde(x); a = V \ y end;
∴
Invoke the function in a loop over the -range, and plot the log and sign of the coefficients
∴
figure(1); clf(); a=zeros(nRows,nCols);
∴
for k in kr n = 2^k; j=k-kmn+1; nr=1:n; lnr=log10.(nr).+1 a[1:n,j] = aCalc(f,n) subplot(3,1,1); plot(nr,log10.(abs.(a[1:n,j])),"o--") subplot(3,1,2); plot(lnr,log10.(abs.(a[1:n,j])),"o--") subplot(3,1,3); plot(1:n,sign.(a[1:n,j]),"o--") end;
∴
subplot(3,1,1); xlabel("i"); ylabel("lg|a[i]|"); grid("on")∴
title("Monomial basis coefficients");∴
subplot(3,1,2); xlabel("lg(i)"); ylabel("sgn(a[i])"); grid("on")∴
subplot(3,1,3); xlabel("i"); ylabel("sgn(a[i])"); grid("on")∴
savefig(dir*"S06Fig01.eps");
∴
-
Find the coefficients in the Newton basis by solving the system . Use the Julia backslash operator.
Solution. As above, define a function to form the Newton basis and solve the resulting system.
∴
function cCalc(f,n) xy = sample(n,f,-π,π); x = xy[:,1]; y = xy[:,2] N = NewtonBasis(x); c = N \ y end;
∴
Invoke the function in a loop over the -range, and plot the log of coefficients
∴
figure(1); clf(); c=zeros(nRows,nCols);
∴
for k in kr n = 2^k; j=k-kmn+1; nr=1:n; lnr=log10.(nr).+1 c[1:n,j] = cCalc(f,n) subplot(3,1,1); plot(nr,log10.(abs.(c[1:n,j])),"o--") subplot(3,1,2); plot(lnr,log10.(abs.(c[1:n,j])),"o--") subplot(3,1,3); plot(1:n,sign.(c[1:n,j]),"o--") end;
∴
subplot(3,1,1); xlabel("i"); ylabel("lg|a[i]|"); grid("on")∴
title("Newton basis coefficients");∴
subplot(3,1,2); xlabel("lg(i)"); ylabel("sgn(a[i])"); grid("on")∴
subplot(3,1,3); xlabel("i"); ylabel("sgn(a[i])"); grid("on")∴
savefig(dir*"S06Fig02.eps");
∴
-
Find the coefficients in the Newton basis by computing the table of divided differences.
Solution. The diagonal of the divided difference table are the coefficients in the Newton basis computed above. Apply DivDif from the Interpolation661 module and compare.
∴
d=zeros(nRows,nCols);
∴
for k in kr n = 2^k; j=k-kmn+1 xy = sample(n,f,-π,π); x = xy[:,1]; y = xy[:,2] d[1:n,j] = DivDif(x,y) err = norm(d[1:n,j]-c[1:n,j]) @printf("k=%d n=%d err=%6.3e\n",k,n,err); end;k=2 n=4 err=1.734e-17
k=3 n=8 err=1.006e-16
k=4 n=16 err=1.011e-15
k=5 n=32 err=1.457e-14
∴
In all cases the results are identical to within machine precision
-
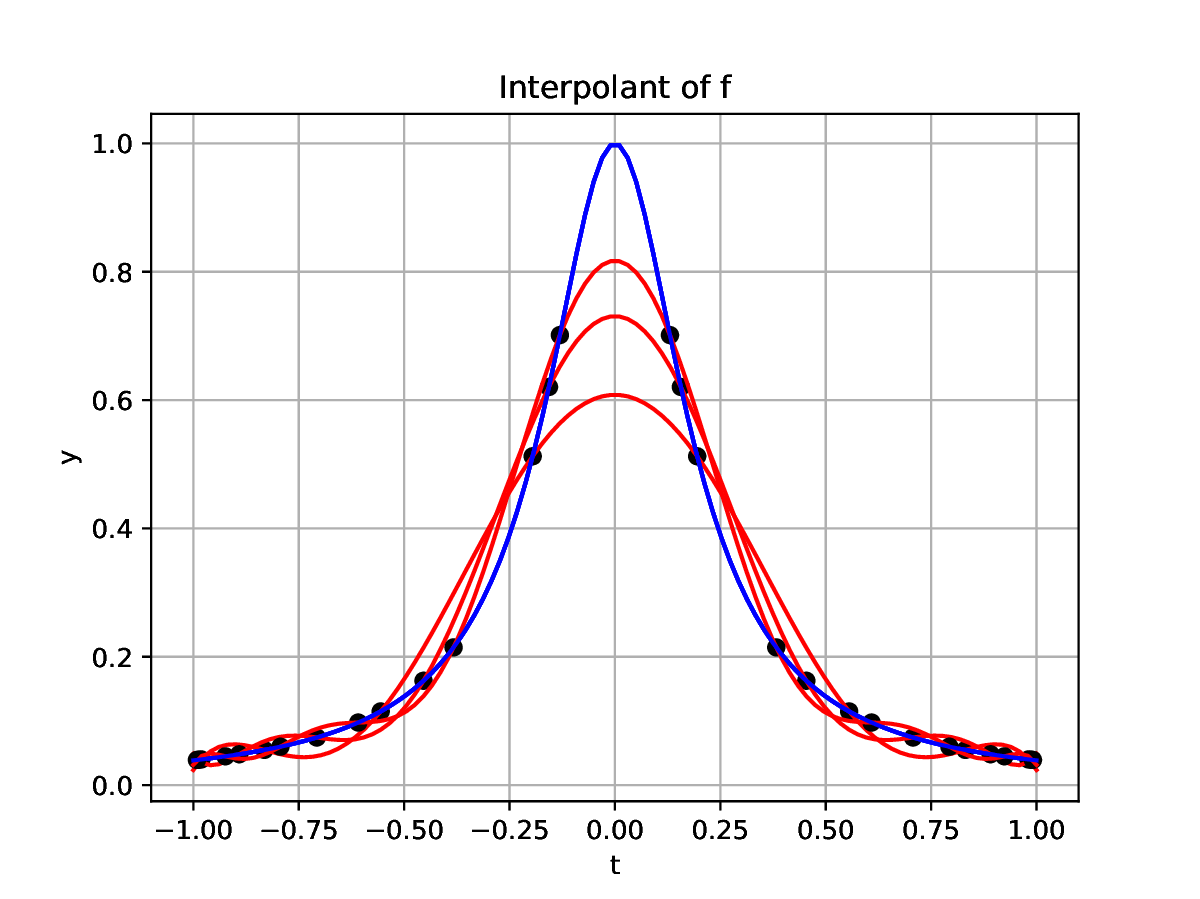
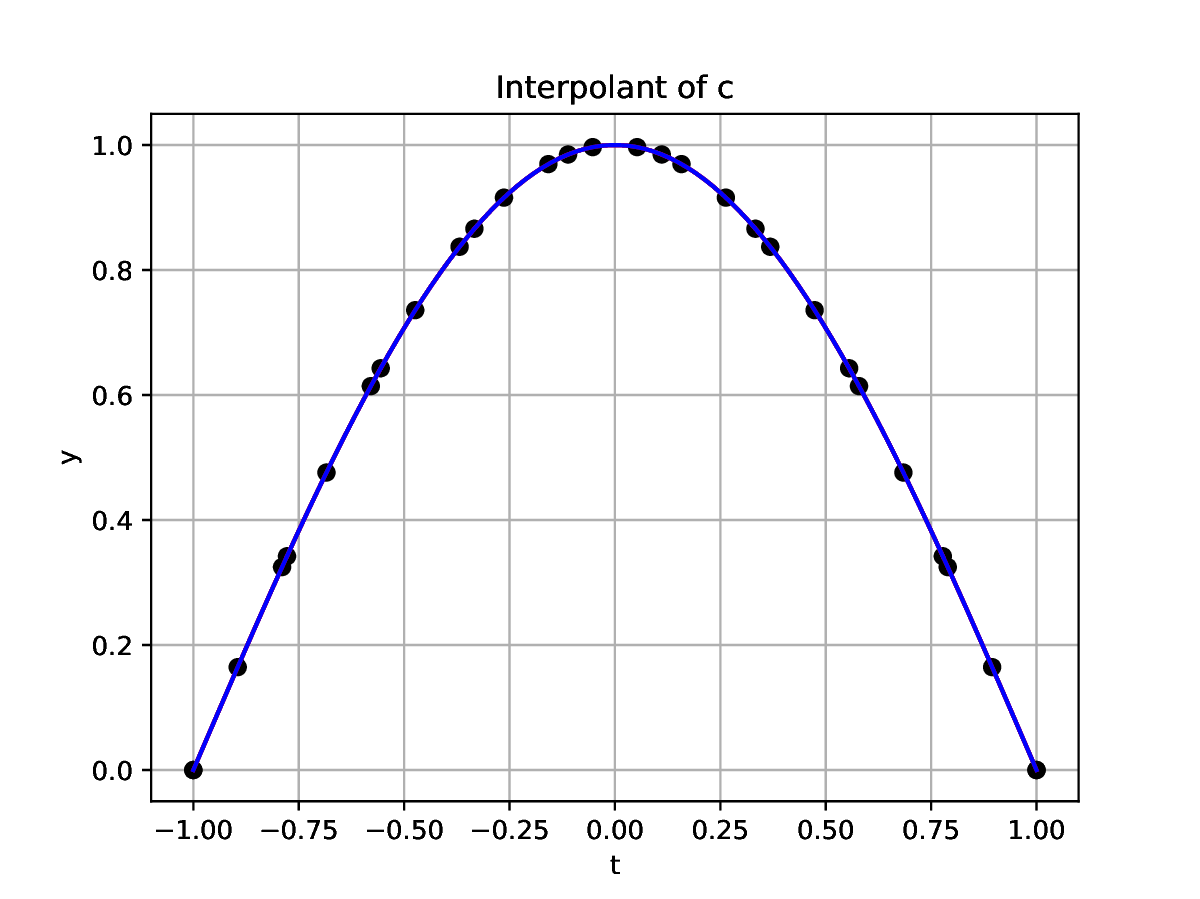
Plot the above approximations evaluated at equidistant points along with the plot of the exact function . Comment on what you observe.
Solution. The values of the monomial and Newton forms of the interpolant are obtained by Horner's scheme for each basis set
∴
figure(1); clf(); n=2^6;
∴
ty=sample(n,f,-π,π); t=ty[:,1]; y=ty[:,2];
∴
subplot(1,2,1); plot(t,y); plot(t[1:2:n],y[1:2:n],"o");
∴
for k in kr j=k-kmn+1; local n=2^k; yN = Horner.(t,Ref(a[1:n,j])) plot(t,yN) end
∴
xlabel("t"); ylabel("p(t)"); title("Monomial interpolants");∴
grid("on");∴
subplot(1,2,2); plot(t,y); plot(t[1:2:n],y[1:2:n],"o");
∴
for k in kr j=k-kmn+1; local n=2^k; local x=LinRange(-π,π,n) yN = Newton.(t,Ref(x),Ref(d[1:n,j])) plot(t,yN) end
∴
xlabel("t"); ylabel("p(t)"); title("Newton interpolants");∴
grid("on");∴
savefig(dir*"S06Fig03.eps");
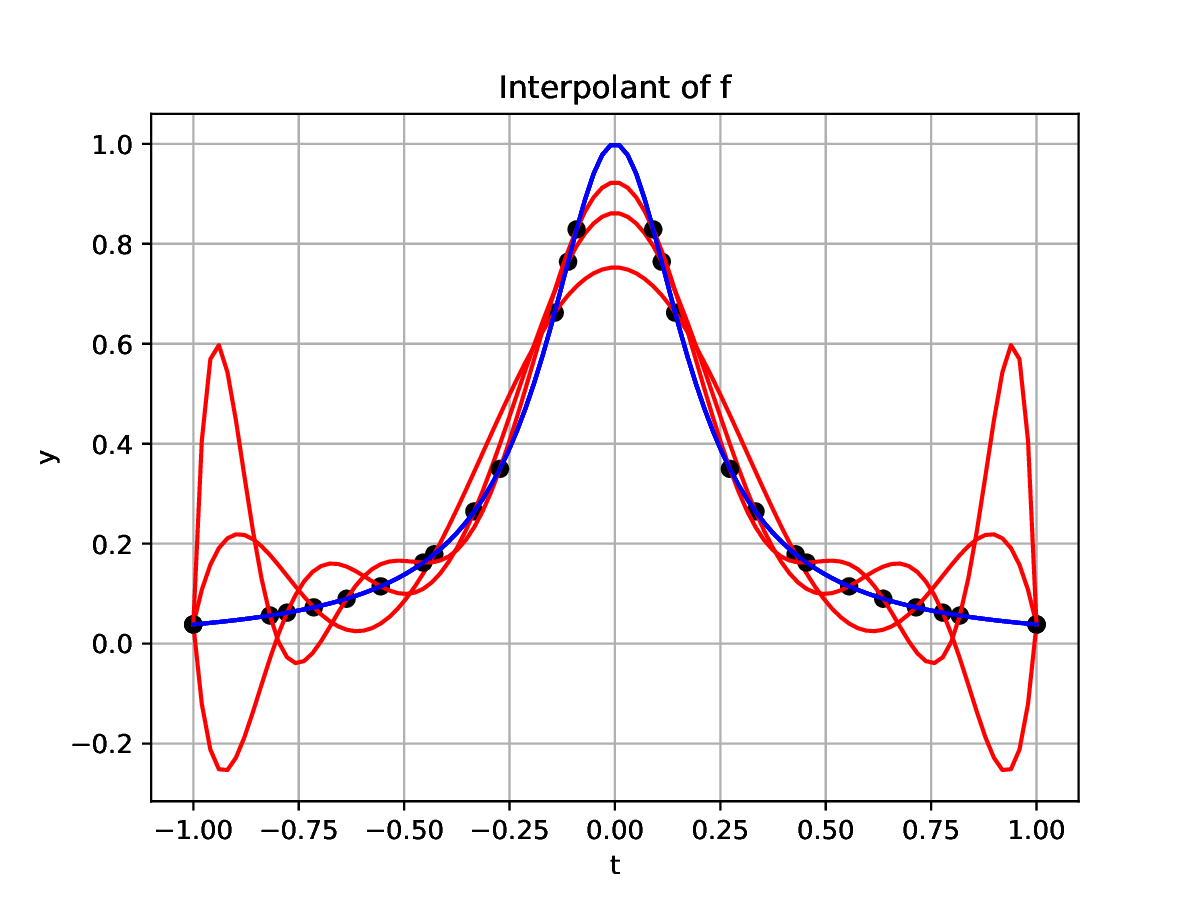
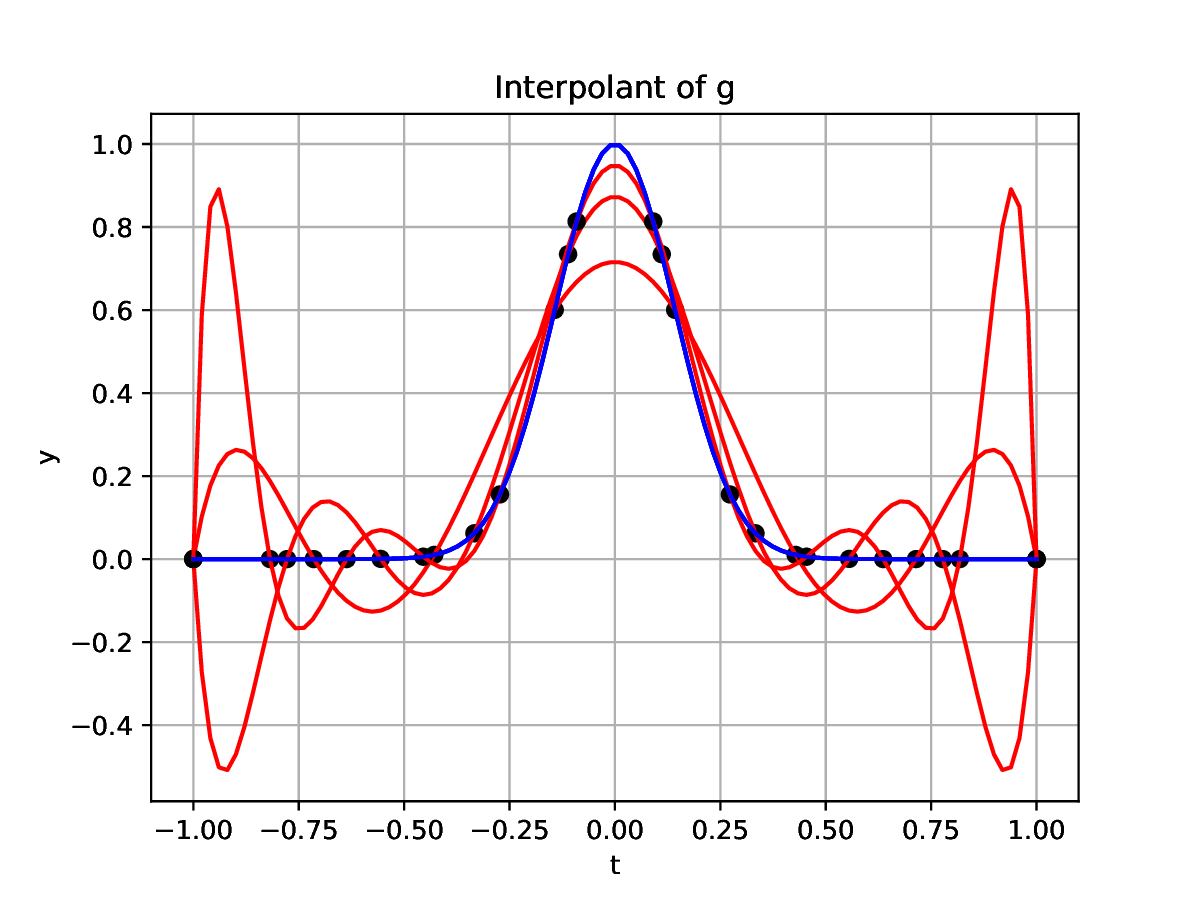
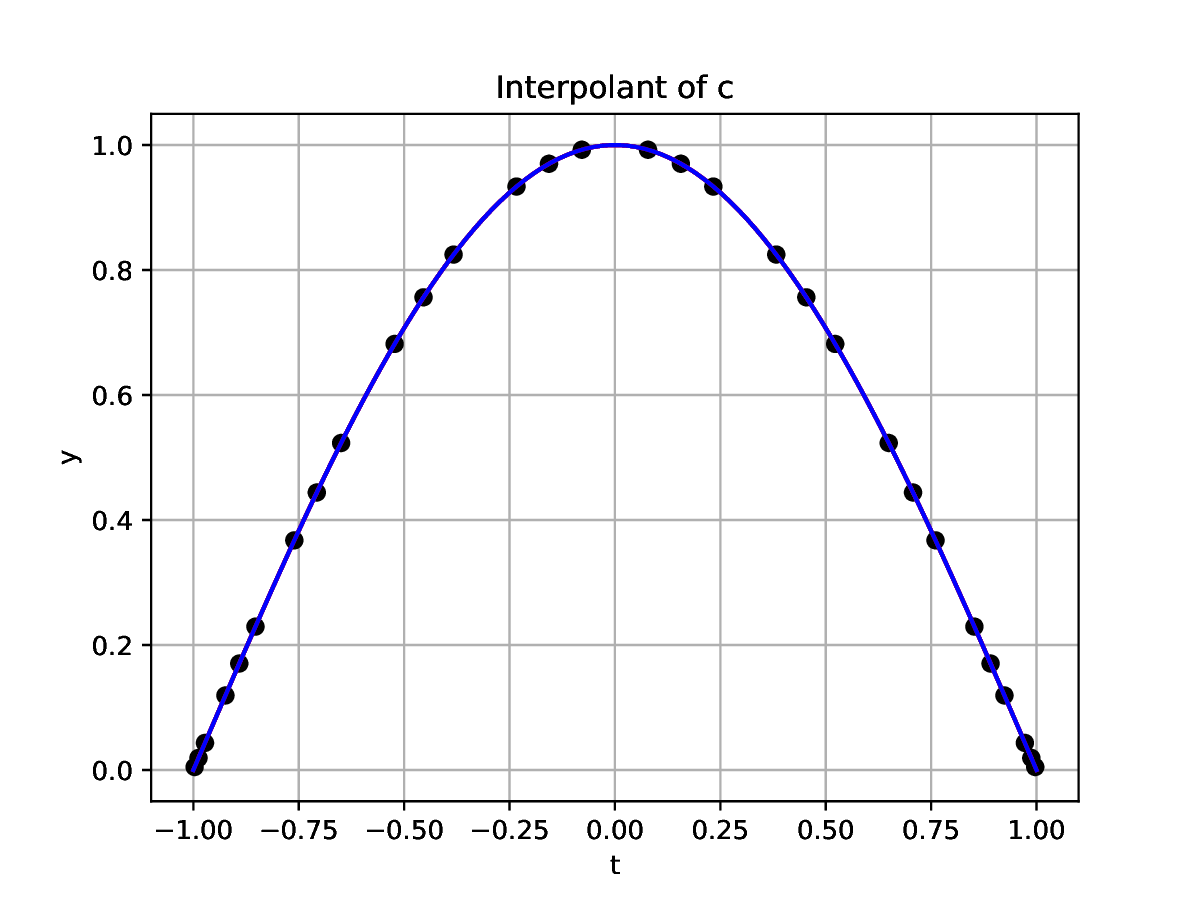
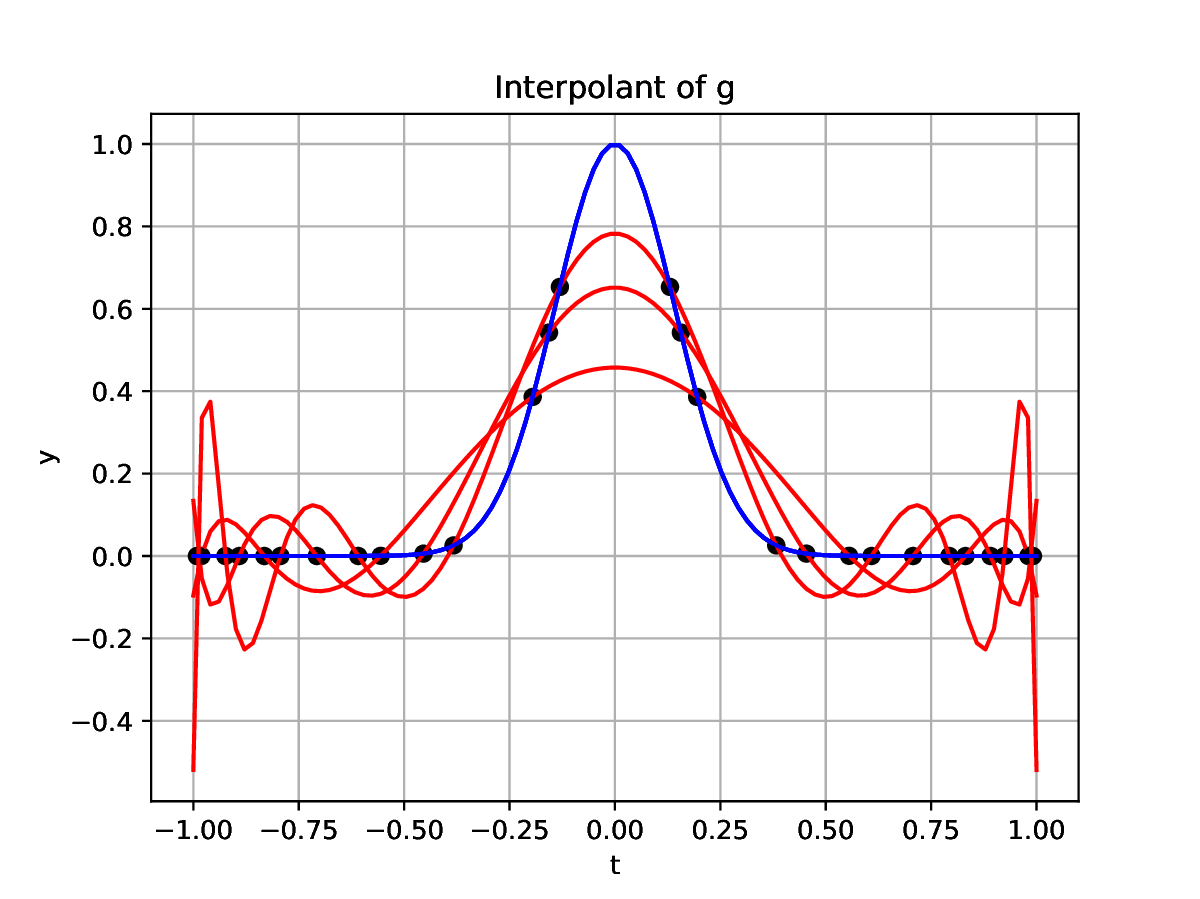
Revisit the approximation of the Runge function from HW03. Comment on the accuracy of polynomial approximation of the Runge function by comparison to that of .
Solution.
∴ |
figure(1); clf(); n=2^6; Runge(t) = 1/(1+25*t^2); |
∴ |
ty=sample(n,f,-π,π); t=ty[:,1]; y=ty[:,2]; |
∴ |
subplot(1,2,1); plot(t,y); plot(t[1:2:n],y[1:2:n],"o"); |
∴ |
for k in kr j=k-kmn+1; local n=2^k; yN = Horner.(t,Ref(a[1:n,j])) plot(t,yN) end |
∴ |
xlabel("t"); ylabel("p(t)"); title("Interpolant of f"); |
∴ |
grid("on"); |
∴ |
subplot(1,2,2); ty=sample(n,Runge,-π,π); t=ty[:,1]; y=ty[:,2]; plot(t,y); plot(t[1:2:n],y[1:2:n],"o"); |
∴ |
for k in kr j=k-kmn+1; local n=2^k aR = aCalc(Runge,n) yR = Horner.(t,Ref(aR)) plot(t,yR) end |
∴ |
xlabel("t"); ylabel("p(t)"); title("Interpolant of Runge function"); |
∴ |
grid("on"); |
∴ |
savefig(dir*"S06Fig04.eps"); |