Rewrite the second-order ODE as a system of first-order equations .
Solution. Denote , and obtain system
Note that the slope function does not explicitly depend on , the system is said to be autonomous.
Carry out a convergence study when applying the single-step Runge-Kutta method
Solution.
Notes:
Convergence of a numerical ODE solution requires consistency
and stability. Linear stability, i.e., stability for the
linearized ODE is required for stability. Whenever carrying
out an ODE numerical solution a preliminary stability
analysis is required to determine step sizes required for
stability and accuracy.
The Julia implementation closely follows the above
mathematical formulation. Sub-tasks within the problem are
encapsulated into Julia functions. Each task is implemented
and subsequently tested. Julia variables closely follow the
mathematical notation.
Linearization of leads to
where is the Jacobian
The standard harmonic oscillator is obtained for , and is useful for testing numerical algorithms and gaining insight into the nonlinear Von der Pol oscillator.
Convergence requires that lie within the domain of stability of a particular scheme. The eigenvalues of are roots of
An immediate observation is that for , is skew-symmetric and hence has purely imaginary eigenvalues, namely , roots of
Define linearized problem eigenvalues
∴ |
function λ(μ,x,w) a=1; b=-μ*(1-x^2); c=1+2*μ*x*w Δ = Complex(b^2-4*a*c) return [-b-sqrt(Δ) -b+sqrt(Δ)]/2 end; |
∴ |
λ(0,0,1) |
(1)
∴ |
Fourth-order Runge-Kutta applied to the model problem gives
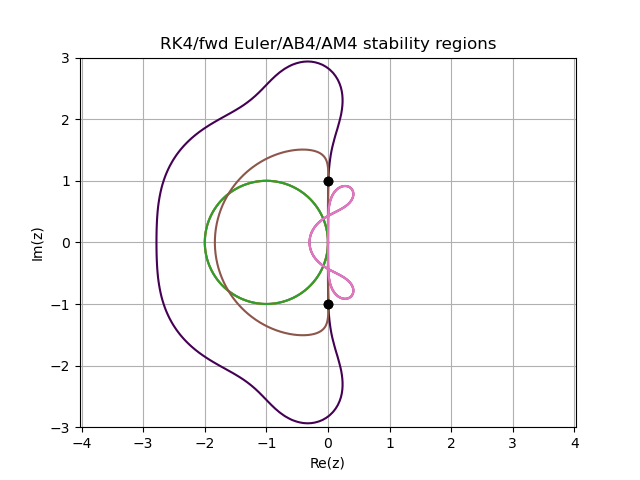
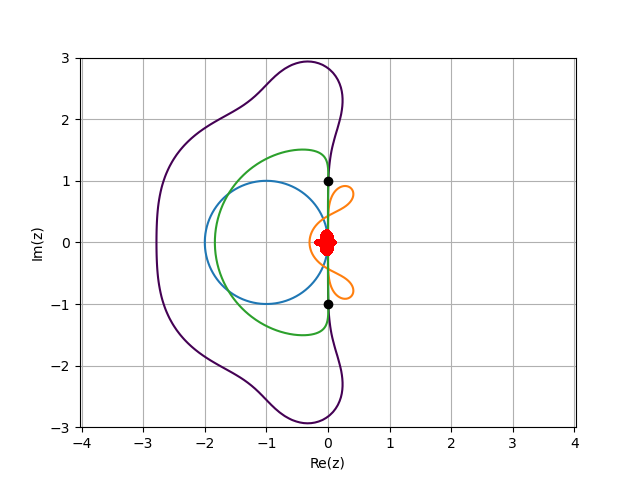
Stability requires . The stability boundary locus is obtained when , and can be ascertained from a contour plot of (Fig. 1).
∴ |
function BLplot(nfig)
np=100; x=range(-3,3,np); y=range(-3,3,np); absP=zeros(np,np);
P(z)=1+z+z^2/2+z^3/6+z^4/24;
for i=1:np
for j=1:np
local z
z=x[i]+Complex(0,1)*y[j]
absP[i,j]=abs(P(z))
end
end
xgrid=repeat(x',np,1)
ygrid=repeat(y,1,np)
figure(nfig); clf(); contour(xgrid,ygrid,absP',[1.0])
grid("on"); axis("equal"); xlabel("Re(z)"); ylabel("Im(z)")
θ=0:0.01:2*pi; x=-1 .+ cos.(θ); y=sin.(θ); plot(x,y)
ρAB4(z)=z^4-z^3; σAB4(z)=(55*z^3-59*z^2+37*z-9)/24
ρAM4(z)=z^4-z^3; σAM4(z)=(251*z^4+646*z^3-264*z^2+106*z-19)/720
ζ=exp.(Complex(0,1)*θ)
zBLAB4=ρAB4.(ζ) ./ σAB4.(ζ)
plot(real.(zBLAB4),imag.(zBLAB4))
zBLAM4=ρAM4.(ζ) ./ σAM4.(ζ)
plot(real.(zBLAM4),imag.(zBLAM4))
plot([0 0],[-1 1],"ko")
title("RK4/fwd Euler/AB4/AM4 stability regions")
end; |
∴ |
figdir=homedir()*"/courses/MATH661/homework/H09/"; |
∴ |
BLplot(2); |
∴ |
savefig(figdir*"schemesBL.png"); |
∴ |
np=50; x=range(-2.5,2.5,np); w=range(-2.5,2.5,np); |
∴ |
reλVdP=zeros(np,np,2); imλVdP=zeros(np,np,2); h=0.2; |
∴ |
for i=1:np for j=1:np λij=h*λ(1,x[i],w[j]) reλVdP[i,j,1:2]=real.(λij) imλVdP[i,j,1:2]=imag.(λij) end end |
∴ |
reλpts=reshape(reλVdP,2*np*np,1); imλpts=reshape(imλVdP,2*np*np,1); |
∴ |
plot(reλpts,imλpts,"r."); |
∴ |
savefig(figdir*"VdPBL.png"); |
Define problem initial condition
∴ |
μ=1; t0=0; t1=250; y0=zeros(2,1); y0[2,1]=1; y0 |
(2)
∴ |
nNSmax=2^20; λNS=Array{Complex}(undef,nNSmax,1); nNS=0; |
∴ |
Define the function for the Van der Pol and harmonic oscillators. Maintain a record of the linearized Van der Pol eigenvalues
∴ |
function fVdPcnt(t,y) global μ,λNS,nNS f=zeros(2,1); x=y[1]; w=y[2]; f[:,1]=[w; -x+μ*(1-x*x)*w] λ12=λ(μ,x,w) nNS=nNS+1; λNS[nNS]=λ12[1] nNS=nNS+1; λNS[nNS]=λ12[2] return f end; |
∴ |
function fVdP(t,y) global μ,λNS,nNS f=zeros(2,1); x=y[1]; w=y[2]; f[:,1]=[w; -x+μ*(1-x*x)*w] return f end; |
∴ |
f0=fVdP(t0,y0) |
(3)
∴ |
function fH(t,y) f=zeros(2,1); x=y[1]; w=y[2]; f[:,1]=[w; -x] return f end; |
∴ |
fH(t0,y0) |
(4)
∴ |
Define the Runge-Kutta method
∴ |
function rk4(t,y,f,h,s=1) k1=h*f(t,y) k2=h*f(t+h/2,y+k1/2) k3=h*f(t+h/2,y+k2/2) k4=h*f(t+h,y+k3) return y+(k1+2*(k2+k3)+k4)/6 end; |
∴ |
y1=rk4(t0,y0,fVdP,1) |
(5)
∴ |
Define a procedure to apply an -step numerical scheme to construct an integral curve for . For Runge-Kutta . For additional starting values are determined from using lower-order versions of the same scheme.
∴ |
function dsolve(t0,t1,nSteps,y0,f,L,s=1)
h=(t1-t0)/nSteps; m=size(y0)[1]
t=h*(0:nSteps) .+ t0; y=zeros(m,nSteps+1)
y[1:m,1]=y0[1:m]
for n=1:s-1
y[1:m,n+1]=L(t[n],y[1:m,n:-1:1],f,h,n)
end
for n=s:nSteps
y[1:m,n+1]=L(t[n],y[1:m,n:-1:n-s+1],f,h,s)
end
return y
end; |
∴ |
dsolve(t0,t0+1,2,y0,fVdP,rk4) |
(6)
∴ |
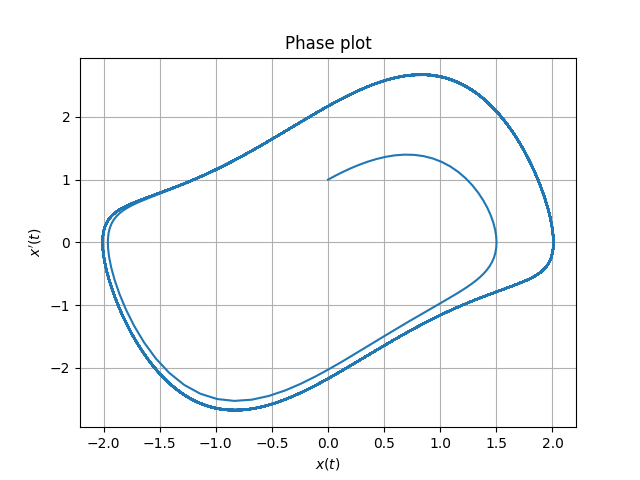
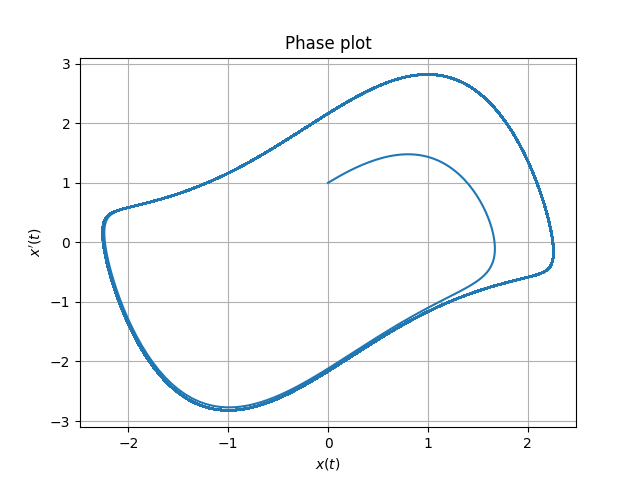
Define a procedure to plot the solution in phase space
∴ |
function pplot(y)
plot(y[1,:],y[2,:]); grid("on"); xlabel(L"$x(t)$"); ylabel(L"$x'(t)$")
title("Phase plot")
end; |
∴ |
clf(); nNS=0; pplot(dsolve(t0,t1,2^12,y0,fVdPcnt,rk4)); |
∴ |
figdir=homedir()*"/courses/MATH661/homework/H09/"; |
∴ |
savefig(figdir*"VdPsol1.png"); |
∴ |
clf(); pplot(dsolve(t0,t1,2^12,y0,fH,rk4)); axis("equal"); |
∴ |
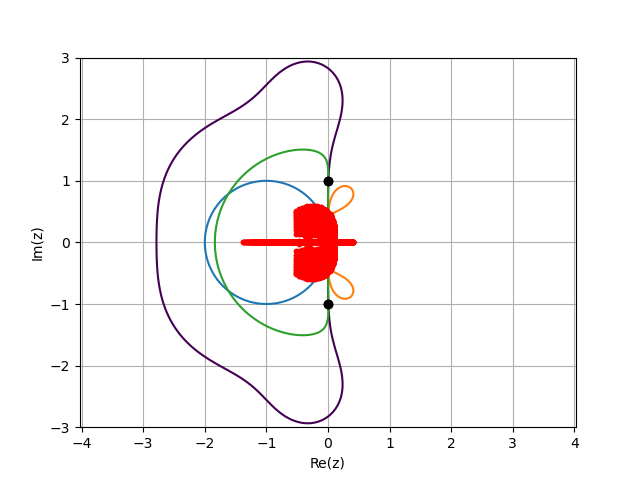
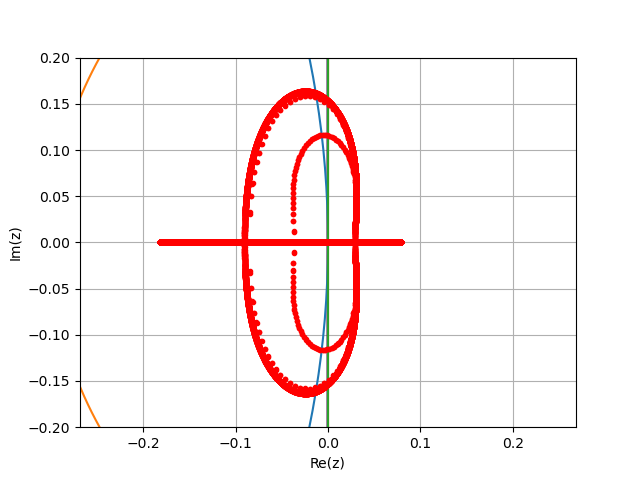
Plot the actually encountered eigenvalues on the stability diagrams
∴ |
hNS=(t1-t0)/2^12; |
∴ |
BLplot(2); plot(real.(hNS*λNS[1:nNS]),imag.(hNS*λNS[1:nNS]),"r."); |
∴ |
savefig(figdir*"VdPRK4NS1.png"); |
∴ |
xlim(-0.2,0.2); ylim(-0.2,0.2); |
∴ |
savefig(figdir*"VdPRK4NS2.png"); |
∴ |
Define a procedure to compute the error between two ODE solutions with steps sizes . Division by the number of points makes this a one-step error.
∴ |
function dsolveErr(y1,y2) n1 = size(y1)[1] return norm(y2[1,1:2:2*n1]-y1[1,1:n1])/n1 end; |
∴ |
y1=dsolve(t0,t1,2^11,y0,fVdP,rk4); |
∴ |
y2=dsolve(t0,t1,2^12,y0,fVdP,rk4); |
∴ |
y3=dsolve(t0,t1,2^13,y0,fVdP,rk4); |
∴ |
[dsolveErr(y1,y2) dsolveErr(y2,y3)] |
(7)
∴ |
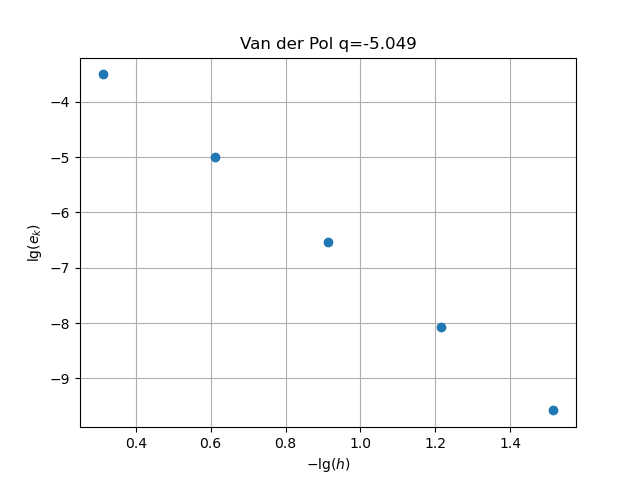
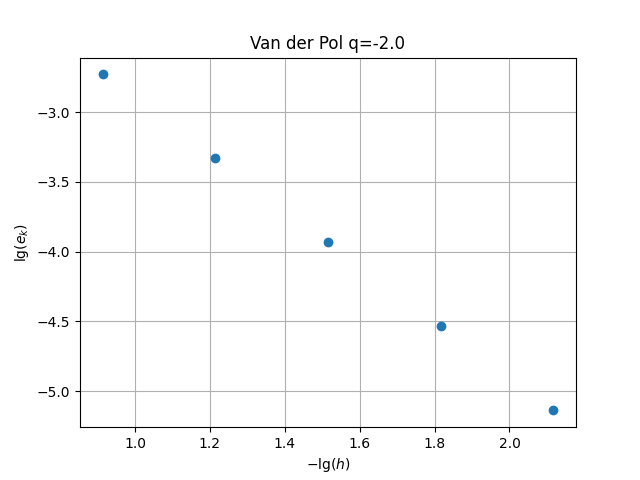
Define a procedure to construct a convergence plot by modification of the procedure from S08
∴ |
function conv(N0,N,fname,figname,L,s=1)
global t0,t1
lgh=zeros(N,1); lgerr=zeros(N,1)
for k=1:N
nsteps=2^(N0+k)
h=(t1-t0)/nsteps; lgh[k]=log10(h)
y1=dsolve(t0,t1, nsteps,y0,fVdP,L,s)
y2=dsolve(t0,t1,2*nsteps,y0,fVdP,L,s)
lgerr[k]=log10(dsolveErr(y1,y2))
end
A=ones(N,2); x=-lgh[1:N]; A[:,2]=x;
q = floor((A\lgerr)[2]*1000)/1000;
plot(x,lgerr,"o"); grid("on"); title(figname*" q="*string(q))
xlabel(L"$-\lg(h)$"); ylabel(L"\lg(e_k)")
savefig(fname)
return q
end; |
∴ |
figure(1); clf(); conv(10,5,figdir*"VdPconvRK4.png","Van der Pol",rk4) |
∴ |
Carry out a convergence study when applying the Adams-Bashforth of order 4.
Solution. Simply define a new numerical scheme and apply the procedures above. Runge-Kutta is a single-step method and produces a new from ,
Adams-Bashforth schemes of order are multistep, and can be considered to advance a vector with components
Define the Adams-Bashforth methods. The input argument is assumed to hold the most recent values
∴ |
bAB=[ 1 0 0 0;
3 -1 0 0;
23 -16 5 0;
55 -59 37 -9]; |
∴ |
w=diagm(0 => 1 ./ [1; 2; 12; 24]); bAB=w*bAB; |
∴ |
function ab(t,y,f,h,s)
global bAB
ynew = y[:,1]
for k=1:s
ynew = ynew + h*bAB[k]*f(t,y[:,k]); t=t-h
end
return ynew
end; |
∴ |
clf(); nNS=0; pplot(dsolve(t0,t1,2^16,y0,fVdP,ab,4)); |
∴ |
savefig(figdir*"ab4sol.png") |
∴ |
y1=dsolve(t0,t1,2^16,y0,fVdP,ab,4); |
∴ |
y2=dsolve(t0,t1,2^17,y0,fVdP,ab,4); |
∴ |
y3=dsolve(t0,t1,2^18,y0,fVdP,ab,4); |
∴ |
[dsolveErr(y1,y2) dsolveErr(y2,y3)] |
(8)
∴ |
figure(1); clf(); conv(10,5,figdir*"VdPconvAB4.png","Van der Pol",ab) |
∴ |